

DC առանց խոզանակ շարժիչկառուցվածքի ձևավորումը շատ խելամիտ է, դրա օգտագործումից մենք կարող ենք հստակ զգալ դրա օգտագործումը, խելամիտ կառուցվածքի առավելությունները հեշտ է օգտագործել, արագ շահագործել, մենք կարող ենք տեսնել, թե որքան բարձր է տնտեսական օգուտը և օգտագործումը խելամիտ կառուցվածքին: Այսպիսով, ո՞րն է դրա կառուցվածքը:
Նախ, նայեք դրա կառուցվածքին.
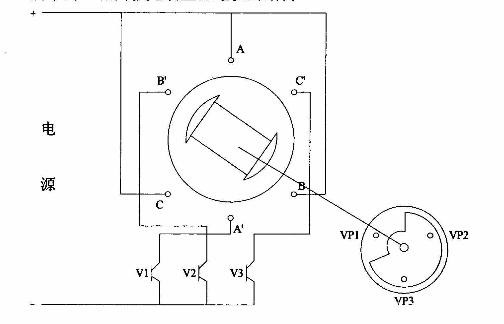
1. A, B և C-ն եռաֆազ ստատորի ոլորուններ են, որոնք համապատասխանաբար միացված են էլեկտրական անջատիչի սարքերի V1, V2 և V3 սարքերի հետ:Դիրքի սենսորի հետևող ռոտորը տեղադրված է շարժիչի ռոտորի վրա: VP1, VP2 և VP3 հավասարաչափ բաշխված են առանց խոզանակի մշտական շարժիչի մի ծայրում՝ 120 աստիճան տարբերությամբ:Ըստ որոշակի ֆոտոէլեկտրական սարքի՝ դրանք ճառագայթվում են լույսով կամ ոչ՝ շարժիչի պտտվող լիսեռի վրա պտտվող կափարիչի ֆունկցիայի միջոցով։
2, ընդհանուր էլեկտրական, էլեկտրական հոսանքի և հիմնական մագնիսական դաշտի ստատորի ոլորուն, որն առաջանում է ռոտորի վրա մշտական մագնիսներով, որոնք առաջանում են էլեկտրամագնիսական ոլորող մոմենտների և ռոտորի պտույտի փոխազդեցության արդյունքում, ռոտորի մագնիսի պողպատի դիրքը դիրքի սենսորով էլեկտրական ազդանշանների մեջ. և այնուհետև կառավարեք էլեկտրոնային անջատիչի սխեման, այնպես որ ստատորի յուրաքանչյուր փուլային ոլորուն, իր հերթին, անցկացնի, ստատորի փուլային հոսանքը ռոտորի դիրքի փոփոխության հետ մեկտեղ որոշակի կարգի փոխարկումով: Էլեկտրոնային անջատիչի սխեմայի հաղորդման հաջորդականությունը կարող է լինել. սինխրոնիզացված ռոտորի ռոտացիայի անկյան հետ՝ մեխանիկական հակադարձ էֆեկտի հասնելու համար:
Քանի որ առանց խոզանակի dc շարժիչի կառուցվածքը ողջամտորեն կարգավորվել է, ուստի այն շատ լավ է օգտագործել, շարժիչի շահագործման գործընթացում, բացի դրա կառուցվածքը հասկանալուց, մենք նաև պետք է անենք, որ դրա հետադարձ ազդեցությունն ավելի իդեալական դարձնենք, և սրանք են. հիմնականում կառուցված է ողջամիտ կառուցվածքի հիման վրա։

Հրապարակման ժամանակը՝ Մար-28-2020



