

Rဘရက်ရှ် DC မော်တာ အလုပ်လုပ်ပုံကို ခေါ်ဆိုပါ။
ပိုနားလည်အောင် ဘယ်လိုလုပ်ရမလဲbrushless မော်တာများအလုပ်မလုပ်မီ၊ brushless DC မော်တာများ မရရှိနိုင်မီ အချိန်အတန်ကြာကတည်းက အသုံးပြုခဲ့သော brushless DC မော်တာ အလုပ်လုပ်ပုံကို ဦးစွာ ပြန်သတိရရပါမည်။
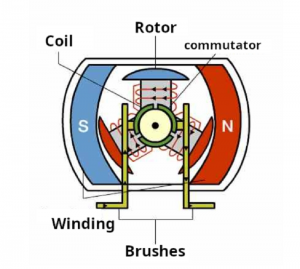
ထုံးစံအတိုင်းDC မော်တာအပြင်ဘက်တွင် အမြဲတမ်းသံလိုက်ရှိပြီး အတွင်းဘက်တွင် ရစ်ပတ်ထားသော သံလိုက်တစ်ခုရှိသည်။အမြဲတမ်းသံလိုက်များသည် ငုတ်လျှိုးနေသောကြောင့် ၎င်းတို့ကို stator ဟုခေါ်သည်။armature လှည့်တဲ့အတွက် ရဟတ်လို့ ခေါ်ပါတယ်။သံလိုက်တွင် လျှပ်စစ်သံလိုက်တစ်ခုပါရှိသည်။ဒီလျှပ်စစ်သံလိုက်ထဲကို လျှပ်စစ်ဓာတ်လည်ပတ်တဲ့အခါ၊ stator မှာရှိတဲ့ သံလိုက်တွေကို ဆွဲဆောင်ပြီး တွန်းလှန်ပေးမယ့် armature ထဲမှာ သံလိုက်စက်ကွင်းတစ်ခု ဖန်တီးပေးပါတယ်။commutator နှင့် brushes များသည် DC brush motor ကို အခြားသော motor အမျိုးအစားများနှင့် ကွဲပြားစေသည့် အဓိက အစိတ်အပိုင်းများဖြစ်သည်။
Brushless DC Motor ဆိုတာ ဘာလဲ။
brushless DC မော်တာ သို့မဟုတ်BLDCလျှပ်စစ်မော်တာသည် တိုက်ရိုက်လျှပ်စီးကြောင်းဖြင့် မောင်းနှင်ပြီး သမားရိုးကျ DC Motors များကဲ့သို့ စုတ်တံမပါဘဲ ၎င်း၏လှုပ်ရှားမှုကို ထုတ်ပေးပါသည်။
Brushless မော်တာများသည် သမားရိုးကျ Brushed DC မော်တာများထက် ပိုမိုကောင်းမွန်သော စွမ်းဆောင်ရည်၊ တိကျသော torque နှင့် rotation speed control တို့ကို ပေးစွမ်းနိုင်သောကြောင့် သမားရိုးကျ brushed DC မော်တာများထက် ယနေ့ခေတ်တွင် ပိုမိုရေပန်းစားလာပါသည်။
Brushless DC Motors ဘယ်လိုအလုပ်လုပ်သလဲ
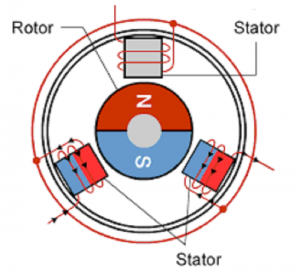
micro brushless motor ၏ လုပ်ဆောင်မှုနိယာမတွင် လှည့်နေသော သံလိုက်နှင့် stationary coil တို့၏ အပြန်အလှန်သက်ရောက်မှု ပါဝင်သည်။သမားရိုးကျ ပွတ်တိုက်ထားသော မော်တာများနှင့် မတူဘဲ၊ ရုပ်ပိုင်းဆိုင်ရာ စုတ်တံများ သို့မဟုတ် ကွန်မြူတာများ ပါဝင်ခြင်း မရှိပါ။စုတ်တံမဲ့မော်တာတွင် အမြဲတမ်းသံလိုက်များပါရှိသော ရဟတ်တစ်ခုသည် ကွိုင်များစွာ သို့မဟုတ် အကွေ့အကောက်များပါရှိသော ငုတ်လျှိုးနေသော stator တစ်ဝိုက်တွင် လှည့်ပတ်သည်။ဤကွိုင်များကို တိကျသော spatial ကြားကာလများတွင် stator ပတ်လည်တွင် နေရာချထားသည်။မော်တာ၏ အီလက်ထရွန်းနစ်ပစ္စည်းများသည် လည်ပတ်နေသော သံလိုက်စက်ကွင်းတစ်ခုဖန်တီးရန် ကွိုင်တစ်ခုစီမှတစ်ဆင့် စီးဆင်းနေသော လျှပ်စီးကြောင်းကို ထိန်းချုပ်သည်။ဤလည်ပတ်နေသော သံလိုက်စက်ကွင်းသည် ရဟတ်ပေါ်ရှိ အမြဲတမ်းသံလိုက်များနှင့် တုံ့ပြန်ပြီး ရဟတ်ကို လှည့်စေသည်။ကွိုင်မှတဆင့် စီးဆင်းနေသော လက်ရှိအချိန်နှင့် ပြင်းအားကို ချိန်ညှိခြင်းဖြင့် လည်ပတ်မှု၏ ဦးတည်ချက်နှင့် အမြန်နှုန်းကို ထိန်းချုပ်နိုင်သည်။ချောမွေ့စွာလှည့်ခြင်းအတွက်၊ ထိန်းချုပ်မှုပတ်လမ်းအား တုံ့ပြန်ချက်ပေးရန်အတွက် တည်နေရာအာရုံခံကိရိယာများကို မော်တာတွင် မကြာခဏ ပေါင်းစပ်ထားသည်။ဤတုံ့ပြန်ချက်သည် မော်တာထိန်းချုပ်ကိရိယာအား ရဟတ်၏တည်နေရာကို တိကျစွာဆုံးဖြတ်နိုင်ပြီး ကွိုင်အတွင်းရှိ လက်ရှိကို ချိန်ညှိနိုင်စေပါသည်။ယေဘုယျအားဖြင့်၊ micro brushless မော်တာများသည် လည်ပတ်နေသော သံလိုက်စက်ကွင်းနှင့် ရဟတ်ပေါ်ရှိ အမြဲတမ်းသံလိုက်များကြား အပြန်အလှန်အကျိုးသက်ရောက်မှုကို အသုံးပြု၍ လည်ပတ်နိုင်ပြီး၊ ရုပ်ပိုင်းဆိုင်ရာ စုတ်တံ သို့မဟုတ် ကွန်မြူတာတာများမလိုအပ်ဘဲ ထိရောက်ပြီး တိကျသောလည်ပတ်မှုကို ခွင့်ပြုသည်။
နိဂုံး
Micro Brushless မော်တာများသည် မြင့်မားသော စွမ်းဆောင်ရည်၊ တာရှည်ခံမှု၊ တိကျသော ထိန်းချုပ်မှု၊ နှင့် နှိုင်းယှဉ်ပါက ဆူညံသံကို လျှော့ချပေးသည်။ရိုးရာမော်တာများ.၎င်းတို့ကို အာကာသယာဉ်၊ ဆေးဘက်ဆိုင်ရာ ကိရိယာများ၊ စက်ရုပ်များနှင့် လူသုံး အီလက်ထရွန်းနစ်ပစ္စည်းများ အပါအဝင် အမျိုးမျိုးသော လုပ်ငန်းများတွင် တွင်ကျယ်စွာ အသုံးပြုကြသည်။တိကျသောမော်တာထိန်းချုပ်မှုအတွက်နည်းပညာနှင့်ဝယ်လိုအားများဆက်လက်ကြီးထွားလာသည်နှင့်အမျှ micro brushless မော်တာအသုံးပြုမှုသည်အနာဂတ်တွင်တိုးလာမည်ဟုမျှော်လင့်ရသည်။
သင်၏ခေါင်းဆောင် ကျွမ်းကျင်သူများနှင့် တိုင်ပင်ပါ။
သင်၏ micro brushless motor လိုအပ်သော၊ အချိန်မှန်နှင့် ဘတ်ဂျက်ဖြင့် အရည်အသွေးကို ပေးဆောင်ရန် ကျွန်ုပ်တို့သည် သင့်အား အမှားအယွင်းများကို ရှောင်ရှားနိုင်ရန် ကူညီပေးပါသည်။
စာတိုက်အချိန်- သြဂုတ်-၂၅-၂၀၂၃



