

Rنحوه کار موتور DC جاروبکدار را به خاطر بیاورید
برای درک بهتر چگونگیموتورهای بدون جاروبکبرای کار، ابتدا باید نحوه کار یک موتور DC جاروبکدار را به یاد بیاوریم، زیرا این موتورها مدتی قبل از اینکه موتورهای DC بدون جاروبک در دسترس قرار گیرند، مورد استفاده قرار میگرفتند.
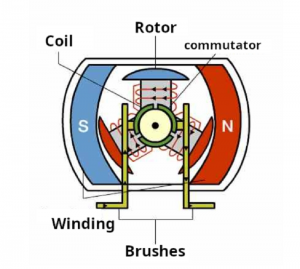
در یک نمونهی معمولیموتور جریان مستقیمآهنرباهای دائمی در قسمت بیرونی و یک آرمیچر چرخان در قسمت داخلی وجود دارد. آهنرباهای دائمی ثابت هستند، بنابراین به آنها استاتور گفته میشود. آرمیچر میچرخد، بنابراین به آن روتور گفته میشود. آرمیچر حاوی یک آهنربای الکتریکی است. وقتی برق را به این آهنربای الکتریکی وصل میکنید، یک میدان مغناطیسی در آرمیچر ایجاد میشود که آهنرباهای استاتور را جذب و دفع میکند. کموتاتور و جاروبکها اجزای اصلی هستند که موتور جاروبک DC را از سایر انواع موتورها متمایز میکنند.
موتور DC بدون جاروبک چیست؟
یک موتور جریان مستقیم بدون جاروبک یابی ال دی سییک موتور الکتریکی است که با جریان مستقیم تغذیه میشود و حرکت خود را بدون هیچ جاروبکی مانند موتورهای DC معمولی تولید میکند.
موتورهای بدون جاروبک امروزه نسبت به موتورهای DC جاروبکدار مرسوم محبوبتر هستند، زیرا راندمان بهتری دارند، میتوانند گشتاور و سرعت چرخش دقیقی را کنترل کنند و به لطف نبود جاروبک، دوام بالا و نویز الکتریکی کمی ارائه میدهند.
موتورهای DC بدون جاروبک چگونه کار میکنند؟
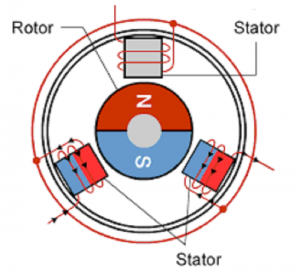
اصل کار یک موتور میکرو براشلس شامل تعامل یک آهنربای چرخان و یک سیمپیچ ثابت است. برخلاف موتورهای سنتی براش، هیچ جاروبک یا کموتاتور فیزیکی در آن دخیل نیست. در یک موتور بدون جاروبک، یک روتور متشکل از آهنرباهای دائمی به دور یک استاتور ثابت حاوی چندین سیمپیچ یا سیمپیچ میچرخد. این سیمپیچها در فواصل مکانی مشخص در اطراف استاتور قرار گرفتهاند. قطعات الکترونیکی موتور، جریان عبوری از هر سیمپیچ را کنترل میکنند تا یک میدان مغناطیسی چرخان ایجاد کنند. این میدان مغناطیسی چرخان با آهنرباهای دائمی روی روتور تعامل دارد و باعث چرخش روتور میشود. جهت و سرعت چرخش را میتوان با تنظیم زمان و بزرگی جریان عبوری از سیمپیچ کنترل کرد. برای چرخش روان، حسگرهای موقعیت اغلب در موتور ادغام میشوند تا به مدار کنترل بازخورد ارائه دهند. این بازخورد، کنترلکننده موتور را قادر میسازد تا موقعیت روتور را به طور دقیق تعیین کرده و جریان در سیمپیچها را بر اساس آن تنظیم کند. به طور کلی، موتورهای میکرو براشلس با استفاده از تعامل بین میدان مغناطیسی چرخان تولید شده توسط سیمپیچهای استاتور و آهنرباهای دائمی روی روتور کار میکنند و امکان چرخش کارآمد و دقیق را بدون نیاز به جاروبک یا کموتاتور فیزیکی فراهم میکنند.
نتیجهگیری
موتورهای میکرو بدون جاروبک در مقایسه با موتورهای دیگر، راندمان بالا، طول عمر طولانی، کنترل دقیق و نویز کمتری دارند.موتورهای سنتیآنها به طور گسترده در صنایع مختلف، از جمله هوافضا، تجهیزات پزشکی، رباتیک و لوازم الکترونیکی مصرفی استفاده میشوند. با توجه به رشد فناوری و تقاضا برای کنترل دقیق موتور، انتظار میرود استفاده از موتورهای میکرو بدون جاروبک در آینده افزایش یابد.
با کارشناسان رهبر خود مشورت کنید
ما به شما کمک میکنیم تا از مشکلات اجتناب کنید و کیفیت و ارزش مورد نیاز موتور میکرو براشلس خود را، به موقع و با بودجهی تعیینشده، ارائه دهید.
زمان ارسال: ۲۵ آگوست ۲۰۲۳



