Միկրո անխոզանակ շարժիչների արտադրող
A միկրո անխոզանակ շարժիչէփոքր չափի էլեկտրական շարժիչորն օգտագործում է անխոզանակ տեխնոլոգիա շարժիչի համար: Էլեկտրաշարժիչը բաղկացած է ստատորից և ռոտորից, որոնց վրա ամրացված են մշտական մագնիսներ: Խոզանակների բացակայությունը վերացնում է շփումը, ինչը հանգեցնում է ավելի մեծ արդյունավետության, ավելի երկար ծառայության ժամկետի և ավելի անաղմուկ աշխատանքի:Միկրո անխոզանակ շարժիչի տրամագիծը սովորաբար 6 մմ-ից պակաս է, ինչը այն դարձնում է հիանալի ընտրություն փոքր սարքերի համար. հատկապես ռոբոտների, կրելի սարքերի և այլ միկրոմեխանիկական կիրառությունների համար, որտեղ կոմպակտ չափը և բարձր արդյունավետությունը կարևոր են:
Որպես մասնագետմիկրո անխոզանակ շարժիչի արտադրողև մատակարար Չինաստանում, մենք կարող ենք բավարարել հաճախորդների կարիքները՝ առաջարկելով բարձրորակ անխոզանակ շարժիչ։ Եթե հետաքրքրված եք, խնդրում ենք կապվել մեզ հետ։Լիդեր Միկրո.
Ինչ ենք մենք արտադրում
Միկրո անխոզանակ շարժիչը կարող է հասնել շատ բարձր արագությունների և ապահովել ճշգրիտ կառավարում, բայց դրանք նաև ավելի բարդ և թանկ են, քան խոզանակային շարժիչները: Այնուամենայնիվ, դրանց գերազանց կատարողականությունն ու հուսալիությունը դրանք դարձնում են նախընտրելի ընտրություն բազմաթիվ կիրառությունների համար, որոնք պահանջում են կոմպակտություն և արդյունավետություն:
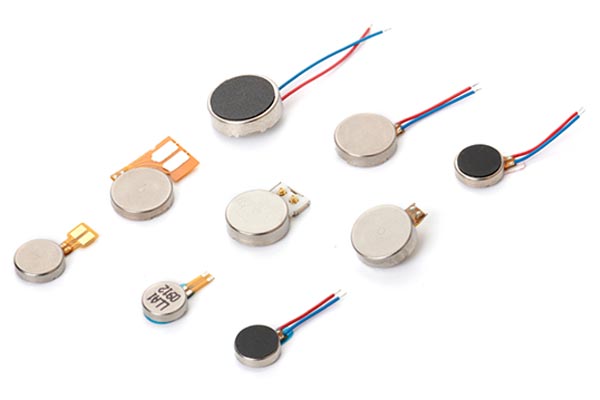
Մեր ընկերությունը ներկայումս առաջարկում է6-12 մմ տրամագծով անխոզանակ շարժիչների չորս մոդելՄենք ունենք տարբեր տրամագծերի տարբերակներ՝ տարբեր կիրառությունների բարձր արագության պահանջները բավարարելու համար: Մենք անընդհատ կատարելագործում ենք մեր անխոզանակ շարժիչների դիզայնը՝ ոլորտի միտումներից առաջ մնալու և մեր հաճախորդների զարգացող պահանջները բավարարելու համար:
Փնտրու՞մ եք ճշգրտություն և սահուն շարժում: Բացահայտեք, թե ինչպես է մերգծային շարժիչներապահովել անգերազանցելի կատարողականություն առաջադեմ ծրագրերի համար։
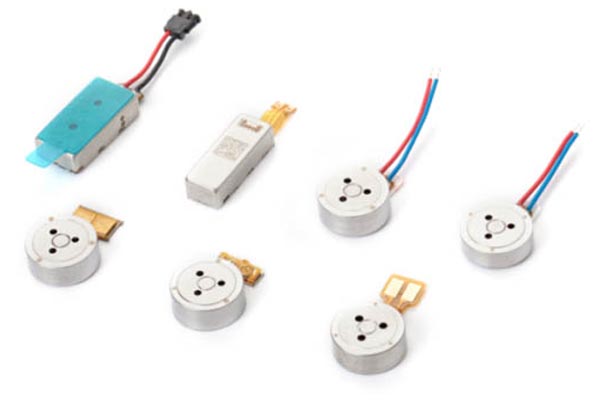
FPCB տեսակը
FPCB (ճկուն տպագիր սխեմաների տախտակ) տիպի BLDC վիբրացիոն շարժիչները ինտեգրում են ճկուն սխեմաներ՝ կոմպակտ, բարձր արդյունավետությամբ գործարկման համար։
Կառուցվածքը՝ճկուն շղթայի դիզայնը հնարավորություն է տալիս տեղավորվել նեղ տարածքներում (կրելի սարքեր, փոքր էլեկտրոնիկա).
Արդյունավետություն՝Առանց խոզանակի աշխատանքը ապահովում է հարթ թրթռում, արդյունավետություն և երկար ծառայության ժամկետ։


Առաջատար մետաղալարի տեսակը
Առաջատար մետաղալարի տեսակ՝ BLDC թրթռումշարժիչներօգտագործելէլեկտրական միացման համար նախատեսված մալուխներ, որոնք առաջարկում են բազմակողմանիություն տարբեր կիրառություններում։
Կառուցվածքը՝ Առաջատար լարի դիզայնը թույլ է տալիս հեշտ ինտեգրում և լարերի ճկունություն, հարմար է այն սարքերի համար, որտեղ անհրաժեշտ է տարածական դասավորություն և միացման հարմարվողականություն։
Արդյունավետություն՝ BLDC տեխնոլոգիայի շնորհիվ դրանք ապահովում են հարթ, արդյունավետ թրթռում երկարացված դիմացկունությամբ՝ զերծ խոզանակային մաշվածությունից։
Ընդհանուր հատկանիշներ՝Հասանելի է տարբեր չափսերով՝ բազմազան պահանջներին համապատասխանելու համար, ապահովելով հուսալի հպտիկ հետադարձ կապ սպառողական էլեկտրոնիկայի, արդյունաբերական սարքավորումների և այլնի համար։





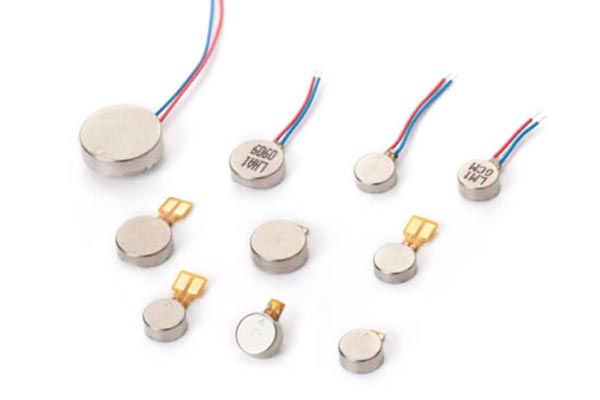
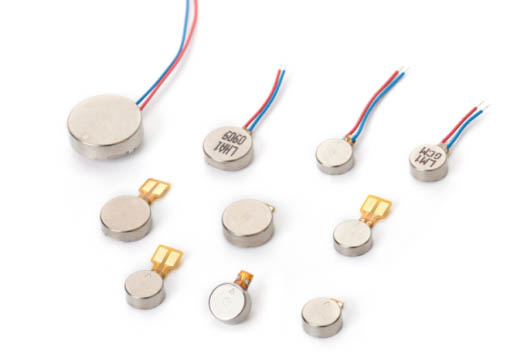
| Մոդելներ | Չափս (մմ) | Գնահատված լարում (Վ) | Գնահատված հոսանք (մԱ) | Գնահատված (RPM) | Լարում (Վ) |
| LBM0525 | φ5*2.5 մմ | 3.0V հաստատուն հոսանք | 90մԱ առավելագույնը | 12000 րոպե | DC2.7-3.3V |
| LBM0620 | φ6*2.0 մմ | 3.0V հաստատուն հոսանք | 80մԱ առավելագույնը | 12000 րոպե | DC2.7-3.3V |
| LBM0625 | φ6*2.5 մմ | 3.0V հաստատուն հոսանք | 80մԱ առավելագույնը | 16000±3000 | DC2.7-3.3V |
| LBM0825 | φ8*2.5 մմ | 3.0V հաստատուն հոսանք | 80մԱ առավելագույնը | 13000±3000 | DC2.7-3.3V |
| LBM1234 | φ12*3.4 մմ | 3.7 Վ հաստատուն հոսանք | 100 մԱ առավելագույնը | 12000±3000 | DC3.0-3.7V |
Հավանո՞ւմ եք մեր նմուշներից մեկը: Պատվիրեք այն և սկսեք ձեր փորձարկման փուլն այսօր:
Ինչո՞ւ ընտրել LEADER-ի միկրո անխոզանակ DC շարժիչները։
LEADER-ի միկրո անխոզանակ DC շարժիչները առանձնանում են հետևյալով.
Մեր շարժիչները(օրինակ՝ φ5–12 մմ չափսեր) նախագծված են ամենախիտ տարածքներում տեղավորվելու համար՝ կատարյալ են կրելի սարքերի, բժշկական իմպլանտների կամ գերբարակ էլեկտրոնիկայի համար։
Մենք առաջարկում ենք անհատականացված դիզայն (FPCB տեսակ, կապարե լարի տեսակ և այլն) և թրթռման պրոֆիլներ՝ բավարարելու համար արդյունաբերական կոնկրետ կարիքները (օրինակ՝ խելացի ժամացույցների համար մեղմ հպտիկական էֆեկտ, արդյունաբերական ահազանգերի համար կայուն թրթռում):
Կառուցված բարձրորակ նյութերից (հազվագյուտ հողային մագնիսներ, ճշգրիտ տպատախտակներ) և խիստ փորձարկումների ենթարկված մեր շարժիչները ապահովում են կայուն աշխատանք կոշտ միջավայրերում (ջերմաստիճանի տատանումներ, խոնավություն):
Մենք ինտեգրում ենք առաջադեմ կոմուտացիոն և կառավարման համակարգեր, որոնք հնարավորություն են տալիս էներգաարդյունավետ, երկարատև աշխատանք կատարել՝ հիմնված միկրոշարժիչների ճարտարագիտության ոլորտում տարիների փորձի վրա։
Արտադրական ողջ գործընթացը՝ սկսած հետազոտություններից և զարգացումներից մինչև արտադրությունը, վերահսկելով տեղում, մենք կարող ենք ավելի լավ կառավարել ծախսերը և ապահովել ժամանակին առաքումը՝ օգնելով ձեզ խուսափել ուշացումներից և բյուջեի գերծանրաբեռնվածությունից։
Մենք կարող ենք բավարարել լարման, լարերի երկարության և ինտերֆեյսների հատուկ պահանջները, ինչը թույլ է տալիս ձեր արտադրանքը կատարելապես հարմարեցնել եզակի կիրառման սցենարներին։
Մեր համապատասխանությունը միջազգային ստանդարտներին, ինչպիսիք են ISO-ն և RoHS-ը, ապահովում է անվտանգություն և կանոնակարգերի պահպանում, ինչը ձեր արտադրանքը դարձնում է համաշխարհային շուկաների համար հարմար՝ առանց համապատասխանության հետ կապված մտահոգությունների։
Մեր մասնագիտական ինժեներները տրամադրում են ընտրության ուղեցույց՝ օգնելով ձեզ արագ ընտրել ճիշտ շարժիչը և կրճատելով ձեր արտադրանքի մշակման ցիկլը։




Հաճախորդների ցավոտ կետերը և մեր լուծումները
Մենք հասկանում ենք, որ հաճախորդները վիբրացիոն շարժիչներ օգտագործելիս բախվում են մի շարք կարևոր մարտահրավերների, և մենք մշակել ենք թիրախային լուծումներ դրանցից յուրաքանչյուրը լուծելու համար՝ հենվելով մեր տեխնոլոգիական և մատակարարման շղթայի ուժեղ կողմերի վրա։
Ավանդական վիբրացիոն շարժիչները հաճախ կարճ ծառայության ժամկետ ունեն, և հաճախակի փոխարինումները կարող են լրջորեն ազդել ձեր արտադրանքի կայունության վրա։
Մեր լուծումը՝Անխոզանակ կառուցվածքի շնորհիվ մեր անխոզանակ վիբրացիոն շարժիչները ունեն 500,000-ից ավելի աշխատանքային ժամկետ (1 վայրկյան միացված և 1 վայրկյան անջատված աշխատանքային ռեժիմով): Ավելին, մենք տրամադրում ենք կյանքի տևողության փորձարկման ամբողջական հաշվետվություններ՝ ապահովելու համար, որ դուք կարողանաք վստահել մեր շարժիչների երկարաժամկետ հուսալիությանը:
Թրթռացող շարժիչների չափազանց մեծ էներգիայի սպառումը կարող է զգալիորեն ազդել սարքերի մարտկոցի աշխատանքի վրա, ինչը լուրջ մտահոգություն է բազմաթիվ կիրառությունների համար։
Մեր լուծումը՝Ցածր հզորության դիզայնի շնորհիվ մեր անխոզանակ վիբրացիոն շարժիչները 20-30%-ով ավելի արդյունավետ են, քան խոզանակային շարժիչները: Այս արդյունավետության բարելավումը նպաստում է ձեր արտադրանքի մարտկոցի ժամկետի երկարացմանը՝ բարելավելով օգտագործողի փորձը:
Անկանխատեսելի մատակարարման ժամկետները և մատակարարման շղթայի խափանումների ռիսկը կարող են ուշացումներ և անորոշություններ առաջացնել ձեր արտադրական ծրագրերում։
Մեր լուծումը՝Մենք ունենք մեր սեփական գործարանը, որը թույլ է տալիս մեզ երաշխավորել զանգվածային արտադրության հզորությունը: Բացի այդ, մենք կարող ենք արագ իրականացնել փոքր խմբաքանակով փորձնական արտադրություն՝ ապահովելով կայուն մատակարարում և ժամանակին առաքում՝ ձեր արտադրական կարիքները բավարարելու համար:

Ինչպե՞ս են նախագծված LEADER-ի միկրո անխոզանակ շարժիչները։
LEADER-ի միկրո անխոզանակ շարժիչները (ինչպես նրանց վիբրացիոն շարժիչների շարքը) նախագծված են մանրանկարչության, կատարողականության և կիրառման համար հատուկ հուսալիության վրա կենտրոնանալով։
LEADER-ը օպտիմալացնում է ստատոր-ռոտորի երկրաչափությունը՝ տեղավորվելու համար գերփոքր ձևաչափերի մեջ (օրինակ՝ մինչև 5 մմ տրամագծով): Բարձրորակ հազվագյուտ հողային մագնիսների և ճշգրիտ մշակված պղնձե փաթույթների նման նյութերը ապահովում են ուժեղ պտտող մոմենտ՝ չնայած փոքր չափսին:
Թրթռման հետ կապված մոդելների համար LEADER-ը շարժիչի նախագծման մեջ ինտեգրում է արդյունավետ BLDC կառավարման տրամաբանություն՝ հնարավորություն տալով ճշգրիտ կառավարել թրթռման հաճախականությունը և ինտենսիվությունը: Սա կարևոր է կրելի կամ բժշկական սարքերում հպտիկ հետադարձ կապի համար:
Անխոզանակ տեխնոլոգիայի միջոցով այս շարժիչները նվազագույնի են հասցնում շփումը և մաշվածությունը: LEADER-ը նաև կատարելագործում է արտադրական գործընթացները՝ ապահովելու համար հետևողականություն, ինչը կարևոր է սպառողական էլեկտրոնիկայի կամ արդյունաբերական IoT սարքերի զանգվածային տեղակայման համար:
Անկախ նրանից՝ FPCB տիպի (ճկուն շղթա), թե՞ կապար-լար տիպի կոնֆիգուրացիաների համար, LEADER-ը հարմարեցնում է շարժիչների դիզայնը՝ համապատասխանեցնելով դրանք որոշակի ոլորտների տարածական և կատարողականի պահանջներին (օրինակ՝ խելացի ժամացույցների համար գերբարակ պրոֆիլներ, բժշկական գործիքների համար ամուր կառուցվածքներ):
Որպես անմիջական արտադրող, մենք ապահովում ենք նմուշների արագ առաքում
Փոքր անխոզանակ շարժիչի հիմնական առանձնահատկությունը.
Մեր շարժիչները նախագծված են ճշգրիտ և հաստատուն աշխատանք ապահովելու համար, ապահովելով ձեր կիրառման սահուն ընթացքը ամեն անգամ։
Մեր առաջադեմ անխոզանակ DC շարժիչները նախագծված են էներգիայի օպտիմալ օգտագործման համար, ինչը թույլ է տալիս ձեզ օգտվել գերազանց էներգաարդյունավետությունից և ցածր շահագործման ծախսերից։
Մեր շարժիչները դիմացել են ժամանակի փորձությանը և չունեն մաշվող խոզանակներ, ինչը նվազագույնի է հասցնում սպասարկման պահանջները և երկարացնում ծառայության ժամկետը։
Վայելեք շարժիչի գերհանգիստ աշխատանքը, որը իդեալական է աղմուկի նկատմամբ զգայուն միջավայրերի համար, ապահովելով հանգիստ մթնոլորտ՝ առանց կատարողականի վրա ազդելու։
Ռոբոտաշինությունից մինչև վերականգնվող էներգիայի լուծումներ, մեր շարժիչները ապացուցել են իրենց արդյունավետությունը բազմազան կիրառություններում՝ ցուցադրելով աննախադեպ բազմակողմանիություն։
Մեր անխոզանակ մշտական շարժիչները հասնում են ավելի բարձր արդյունավետության՝ վերացնելով ավանդական շարժիչների խոզանակներից առաջացող շփումը, ինչի արդյունքում ավելի քիչ ջերմություն է առաջանում և ավելի երկար է շարժիչի կյանքը։
Մեր շարժիչները ավելի փոքր և թեթև են, ինչը դրանք իդեալական է դարձնում այն կիրառությունների համար, որտեղ տարածքի և քաշի սահմանափակումները կարևոր նկատառումներ են՝ ապահովելով առավելագույն արդյունավետություն սահմանափակ տարածքում։
Դիմում
Փոքր անխոզանակ շարժիչները, որպես կանոն, ավելի փոքր են և ավելի արդյունավետ, քան խոզանակային շարժիչները։ BLDC-նմետաղադրամի թրթռման շարժիչմի փոքր ավելի թանկ է՝ դրայվերային ինտեգրալ սխեմայի ներառման պատճառով: Այս շարժիչները սնուցելիս կարևոր է ուշադրություն դարձնել բևեռականությանը (+ և -): Բացի այդ, դրանք հայտնի են իրենց ավելի երկարակյացությամբ, ավելի քիչ աղմուկ են առաջացնում և կարող են օգտագործվել ավելի լայն կիրառություններում: Ներառյալ՝
BLDC վիբրացիոն շարժիչները լայնորեն օգտագործվում են մերսման աթոռներում՝ տարբեր մերսման տեխնիկաներ ապահովելու և մկանային լարվածությունը թեթևացնելու համար: Այս շարժիչները առաջացնում են տարբեր ինտենսիվությունների և հաճախականությունների վիբրացիաներ՝ արյան շրջանառությունը խթանելու և մարմինը թուլացնելու համար: Դրանք նաև օգտագործվում են այլ անձնական խնամքի միջոցներում, ինչպիսիք են ձեռքի մերսիչները, ոտքերի լոգարանները և դեմքի մերսիչները:
BLDC վիբրացիոն շարժիչները ինտեգրված են խաղի կառավարիչների մեջ՝ շոշափելի հետադարձ կապ ապահովելու համար, որը բարելավում է խաղային փորձը՝ ապահովելով հպման զգացողություն: Դրանք ապահովում են վիբրացիա և հետադարձ կապ՝ խաղի տարբեր իրադարձություններ, ինչպիսիք են բախումները, պայթյունները կամ զենքի հետհարվածը, մոդելավորելու համար:
BLDC վիբրացիոն շարժիչները լայնորեն օգտագործվում են վիբրացիոն ահազանգերում և փեյջերներում՝ լսողության խնդիրներ ունեցող մարդկանց համար աննկատ և արդյունավետ ծանուցումներ տրամադրելու համար: Շարժիչը ստեղծում է վիբրացիաներ, որոնք օգտատերերը կարող են զգալ՝ տեղեկացնելով նրանց մուտքային զանգերի, հաղորդագրությունների կամ ահազանգերի մասին: Դրանք նաև օգտագործվում են վիբրացիոն դաստակների և սիրենների մեջ նրանց համար, ովքեր դժվարանում են լսել լսելի ահազանգերը կամ սիրենները:
Միկրո անխոզանակ շարժիչները հաճախ օգտագործվում են բժշկական սարքերում՝ իրենց փոքր չափերի, բարձր արդյունավետության և ճշգրիտ կառավարման շնորհիվ: Ատամնաբուժական հորատիչները, վիրաբուժական գործիքները և պրոթեզային սարքերը բժշկական սարքեր են, որոնք օգտվում են այս շարժիչներից: 3 Վ միկրո անխոզանակ շարժիչների օգտագործումը բժշկական սարքերում կարող է ավելի լավ արդյունքներ ապահովել հիվանդների համար, ներառյալ ավելի արագ ընթացակարգեր, ավելի սահուն շարժումներ և բարելավված վերահսկողություն: Բժշկական սարքերի ճշգրտությունն ու արդյունավետությունը բարձրացնելով՝ այս շարժիչները կարող են օգնել բարելավել հիվանդների հարմարավետությունը և ընդհանուր արդյունքները:
Միկրո անխոզանակ շարժիչները լայնորեն օգտագործվում են խելացի ժամացույցներում՝ թրթռման ֆունկցիան կառավարելու համար: Դրանք ապահովում են ճշգրիտ և հուսալի հպտիկ հետադարձ կապ՝ օգտատերերին տեղեկացնելով մուտքային ծանուցումների, զանգերի կամ ահազանգերի մասին: Միկրո շարժիչները փոքր են, թեթև և սպառում են շատ քիչ էներգիա, ինչը դրանք իդեալական է դարձնում կրելի տեխնոլոգիաների մեջ օգտագործելու համար:
Միկրո անխոզանակ շարժիչները հաճախ օգտագործվում են գեղեցկության սարքերում, ինչպիսիք են դեմքի մերսիչները, մազահեռացման սարքերը և էլեկտրական սափրիչները: Այս սարքերը ապավինում են շարժիչի թրթռմանը՝ իրենց նախատեսված գործառույթները կատարելու համար: Միկրոշարժիչի կոմպակտ չափսը և ցածր աղմուկը դրանք իդեալական են դարձնում ձեռքի գեղեցկության սարքերի համար:
Միկրո անխոզանակ շարժիչները լայնորեն օգտագործվում են փոքր ռոբոտներում, անօդաչու թռչող սարքերում և այլ միկրոմեխանիկական համակարգերում: Շարժիչները ապահովում են ճշգրիտ և բարձր արագությամբ կառավարում, որը կարևոր է այս սարքերի արդյունավետ աշխատանքի համար: Դրանք օգտագործվում են ռոբոտների տարբեր կիրառություններում, ինչպիսիք են շարժիչի շարժիչը, ղեկը և շարժումները:
Ամփոփելով՝ միկրոանխոզանակ շարժիչները ապահովում են ճշգրիտ կառավարում, ցածր աղմուկ և բարձր արդյունավետություն։ Դրանք հաճախ նախընտրելի են ավանդական խոզանակային շարժիչների համեմատ՝ իրենց բազմաթիվ առավելությունների պատճառով։
Ինչո՞ւ են անխոզանակ վիբրացիոն շարժիչները գերազանցում խոզանակային շարժիչներին։
Համեմատած ավանդական խոզանակային վիբրացիոն շարժիչների հետ, անխոզանակ մոդելները գերազանցում են իրենց ծառայության ժամկետով, արդյունավետությամբ և վիբրացիոն կայունությամբ՝ բոլորն էլ պայմանավորված իրենց անխոզանակ դիզայնով և վարորդի կողմից կառավարվող աշխատանքով։
Խոզանակավոր շարժիչները խափանվում են հիմնականում խոզանակ-կոմուտատոր շփումից առաջացող մեխանիկական մաշվածության պատճառով. երբ կոմուտատորը պտտվում է, մետաղական/ածխածնային խոզանակները շփվում են դրա հետ՝ աստիճանաբար մաշվելով: Մաշված խոզանակի մասնիկները նաև խցանում են կոմուտատորի հատվածների միջև եղած ճեղքերը, ինչը հանգեցնում է կարճ միացման: Խոզանակները կարող են նույնիսկ կոտրվել՝ առաջացնելով բաց միացման խափանումներ: Սովորաբար խոզանակավոր շարժիչները ծառայում են ընդամենը 100000 ցիկլ (1 վայրկյան միացված, 1 վայրկյան անջատված):
Անխոզանակ շարժիչները վերացնում են խոզանակներն ու կոմուտատորները՝ վերացնելով մեխանիկական մաշվածության ռիսկերը: Դրանց հիմնական բաղադրիչները (կծիկներ, մագնիսներ, շարժիչի ինտեգրալ սխեման) ժամանակի ընթացքում նվազագույն քայքայում են ապրում, ինչը թույլ է տալիս դրանց աշխատել 500000 ցիկլ (1 վրկ միացված, 1 վրկ անջատված):
Խոզանակավոր շարժիչները էներգիա են վատնում երկու հիմնական ձևով.
- Կոնտակտային դիմադրություն. խոզանակների և կոմուտատորի միջև շփումը ստեղծում է էլեկտրական դիմադրություն, որը մուտքային էներգիայի մի մասը վերածում է ջերմության (այլ ոչ թե պտտման ուժի):
- Աղեղային կորուստ. Երբ խոզանակները անցնում են կոմուտատորի հատվածների միջև, առաջանում են էլեկտրական աղեղներ (անընդհատ լիցքաթափումներ, ի տարբերություն կարճ կայծերի), որոնք սպառում են լրացուցիչ էներգիա։
Անխոզանակ շարժիչները չունեն շփման դիմադրություն կամ աղեղային առաջացում։ Էլեկտրական էներգիան ստատորի կծիկներում անմիջապես վերածվում է մագնիսական էներգիայի, ապա՝ պտտման ուժի՝ նվազագույնի հասցնելով էներգիայի վատնումը։ Այս արդյունավետությունը դրանք հարմար է դարձնում մարտկոցով աշխատող սարքերի կամ այն կիրառությունների համար, որտեղ էներգախնայողությունը կարևոր է։
Խոզանակավոր շարժիչները անկայուն թրթռում են առաջացնում անհամապատասխան հոսանքի և մաշվածության պատճառով։
- Անկայուն հոսանքի մատակարարում. խոզանակ-կոմուտատոր շփման ճեղքերի տատանումները (մաշվածությունից կամ հավասարեցումից) առաջացնում են հոսանքի տատանումներ, ինչը հանգեցնում է լիսեռի անկանոն պտտման արագության և անհավասար տատանումների։
- Մաշվածությունից առաջացած շեղում. խոզանակների մաշվելուն զուգընթաց դրանց շփման մակերեսը կծկվում է, իսկ դիմադրությունը մեծանում, ինչը վատթարացնում է հոսանքի տատանումները և դարձնում տատանումների ամպլիտուդը/հաճախականությունը անկանխատեսելի։
Անխոզանակ շարժիչները օգտագործում են դրայվերի ինտեգրալ սխեման՝ ստատորի հզորության ժամանակացույցը ճշգրիտ կառավարելու համար, ապահովելով կայուն, անընդհատ հոսանքի մատակարարում. լիսեռը պտտվում է միատարր արագությամբ, իսկ էքսցենտրիկ զանգվածը ստեղծում է կայուն թրթռում: Առանց մեխանիկական մաշվածության, դրանց աշխատանքը մնում է կայուն ժամանակի ընթացքում՝ խուսափելով թրթռման շեղումից նույնիսկ հազարավոր ժամերի օգտագործումից հետո:
Խոզանակով DC շարժիչներ | Անխոզանակ DC շարժիչներ |
| Ավելի կարճ կյանքտարածություն | Ավելի երկար կյանքի տևողություն |
| ավելացել է ավելի բարձր աղմուկը | Նվազեցված ավելի հանգիստ աղմուկ |
| Ավելի ցածր հուսալիություն | Ավելի բարձր հուսալիություն |
| Ցածր գին | Բարձր գին |
| Ցածր արդյունավետություն | Բարձր արդյունավետություն |
| Կոմուտատորի կայծ | Առանց կայծերի |
| Ցածր պտույտներ | Բարձր պտույտներ |
| Հեշտ է վարել | Դժվարվարել |
Անխոզանակ շարժիչի կյանքի տևողությունը
Միկրո անխոզանակ մշտական հոսանքի շարժիչի կյանքի տևողությունը հիմնականում կախված է մի քանի գործոններից, ինչպիսիք են դրա հավաքման որակը, շահագործման պայմանները և սպասարկման պրակտիկան: Ընդհանուր առմամբ, անխոզանակ շարժիչները ավելի երկար կյանքի տևողություն ունեն, քան խոզանակային շարժիչները՝ իրենց ավելի արդյունավետ դիզայնի շնորհիվ, որը նվազեցնում է մեխանիկական մաշվածությունը: Պետք է նշել, որ շարժիչը պետք է հավաքվի տերմինալային սարքին առաքման օրվանից հետո վեց ամսվա ընթացքում: Եթեփոքր թրթռացող շարժիչԵթե չի օգտագործվել վեց ամսից ավելի, խորհուրդ է տրվում օգտագործելուց առաջ միացնել շարժիչը էլեկտրականությամբ (միացված 3-5 վայրկյան)՝ լավագույն թրթռման էֆեկտին հասնելու համար։
Այնուամենայնիվ, մի քանի գործոններ կարող են ազդել մինի անխոզանակ շարժիչի կյանքի տևողության վրա: Օրինակ, եթե շարժիչը շահագործվում է իր նախագծային պարամետրերից դուրս կամ ենթարկվում է անբարենպաստ պայմանների, դրա աշխատանքը արագորեն կնվազի, և կյանքի տևողությունը կնվազի: Նմանապես, անպատշաճ սպասարկման պրակտիկան կարող է հանգեցնել շարժիչի արագ մաշվածության, ինչը կհանգեցնի անսարքության կամ նույնիսկ շարժիչի խափանման:
Փոքրիկ անխոզանակ շարժիչի կյանքի տևողությունը երկարացնելու համար կարևոր է պատշաճ աշխատանքի և սպասարկման ապահովումը: Համապատասխան տեղադրման պրակտիկան, կանոնավոր սպասարկումը և մաքուր էներգիայի բավարար մատակարարումը կարող են օգնել երկարացնել շարժիչի կյանքի տևողությունը: Փոքրիկ անխոզանակ շարժիչի կանոնավոր ստուգումը, ներառյալ մասերի փոխարինումը և մաքրումը, կարող է օգնել հայտնաբերել խնդիրները, նախքան դրանք զգալի վնաս կպատճառեն:
Ստացեք միկրո անխոզանակ շարժիչներ մեծածախ՝ քայլ առ քայլ
Հաճախակի տրվող հարցեր միկրո անխոզանակ շարժիչի մասին
Անխոզանակ շարժիչ ընտրելիս պետք է հաշվի առնել կարևոր պարամետրեր, այդ թվում՝ անվանական լարումը, անվանական հոսանքը, անվանական արագությունը և էներգիայի սպառումը: Պետք է նաև գնահատվեն շարժիչի չափսերն ու քաշը՝ համոզվելու համար, որ այն համապատասխանում է նախատեսված կիրառմանը:
3V միկրո bldc շարժիչները ավելի փոքր և թեթև են, քան շատ այլ տեսակի անխոզանակ շարժիչներ, ինչը դրանք իդեալական է դարձնում փոքրածավալ կիրառություններում օգտագործելու համար: Այնուամենայնիվ, դրանք ընդհանուր առմամբ պակաս հզոր են, քան ավելի մեծ անխոզանակ շարժիչները:
Այո, բայց դրանք պետք է պատշաճ կերպով պաշտպանված լինեն խոնավությունից և ծայրահեղ ջերմաստիճաններից, որոնք կարող են վնաս պատճառել։
Այո։ Շարժիչի շարժիչը կարևոր է շարժիչի արագությունը, պտտման ուղղությունը կառավարելու և շարժիչին անհրաժեշտ հոսանքի ճշգրիտ քանակը մատակարարելու համար։ Առանց շարժիչի շարժիչի շարժիչը ճիշտ չի աշխատի, իսկ դրա աշխատանքը և կյանքի տևողությունը կվտանգվեն։
Քայլ 1: Որոշեք անխոզանակ հաստատուն հոսանքի շարժիչի լարման և հոսանքի պահանջները։
Քայլ 2:Ընտրեք շարժիչի կարգավորիչ, որը համապատասխանում է շարժիչի տեխնիկական բնութագրերին։
Քայլ 3:Անխոզանակ հաստատուն հոսանքի շարժիչը միացրեք շարժիչի կառավարիչին՝ համաձայն արտադրողի հրահանգների։
Քայլ 4: Միացրեք հոսանքը շարժիչի կարգավորիչին՝ համոզվելով, որ լարման և հոսանքի վարկանիշները համապատասխանում են շարժիչի և կարգավորիչի պահանջներին։
Քայլ 5:Կարգավորեք շարժիչի կարգավորիչի կարգավորումները, ներառյալ շարժիչի ցանկալի արագությունը, ուղղությունը և հոսանքի սահմանները։
Քայլ 6:Հաստատեք կապ շարժիչի կառավարիչի և կառավարման համակարգի կամ ինտերֆեյսի միջև, որը հրամաններ է ուղարկում շարժիչին։
Քայլ 7:Օգտագործեք կառավարման համակարգ կամ ինտերֆեյս՝ շարժիչի կառավարիչին հրամաններ ուղարկելու համար, ինչպիսիք են մեկնարկը, կանգառը, արագության կամ ուղղության փոփոխությունը։
Քայլ 8:Վերահսկեք շարժիչի աշխատանքը և, անհրաժեշտության դեպքում, կարգավորեք շարժիչի կարգավորիչի կարգավորումները՝ աշխատանքը օպտիմալացնելու կամ ցանկացած խնդիր լուծելու համար։
Քայլ 9:Ավարտելուց հետո անվտանգ կերպով անջատեք շարժիչը շարժիչի կառավարիչից և սնուցման աղբյուրից։
Անխոզանակ մշտական հոսանքի վիբրացիոն շարժիչներ, որոնք հայտնի են նաև որպեսBLDC շարժիչներԱնխոզանակ մետաղադրամային վիբրացիոն շարժիչները սովորաբար բաղկացած են շրջանաձև ստատորից և դրա մեջ տեղակայված էքսցենտրիկ սկավառակաձև ռոտորից: Ռոտորը բաղկացած է մշտական մագնիսներից, որոնք շրջապատված են ստատորին ամրացված մետաղալարերի կծիկներով: Երբ կծիկին էլեկտրական հոսանք է կիրառվում, այն ստեղծում է մագնիսական դաշտ, որը փոխազդում է ռոտորի վրա գտնվող մագնիսների հետ՝ ստիպելով այն արագ պտտվել: Այս պտտական շարժումը ստեղծում է թրթռումներ, որոնք փոխանցվում են այն մակերեսին, որտեղ դրանք տեղադրված են՝ ստեղծելով բզզոց կամ թրթռացող էֆեկտ:
Անխոզանակ շարժիչների առավելություններից մեկն այն է, որ դրանք չունեն ածխածնային խոզանակներ, ինչը վերացնում է ժամանակի ընթացքում մաշվածության խնդիրը՝ դրանք դարձնելով բարձր հուսալիություն և արդյունավետություն։
Այս շարժիչները զգալիորեն ավելի երկար ծառայության ժամկետ ունեն, քան ավանդական մետաղադրամով խոզանակով շարժիչները, հաճախ առնվազն 10 անգամ ավելի երկար։ Փորձարկման ռեժիմում, երբ շարժիչը աշխատում է 0.5 վայրկյան միացված և 0.5 վայրկյան անջատված ցիկլով, ընդհանուր ծառայության ժամկետը կարող է հասնել 1 միլիոն անգամի։ Հարկ է նշել, որ ներկառուցված դրայվերներով անխոզանակ շարժիչները չպետք է աշխատեցվեն հակառակ ուղղությամբ, հակառակ դեպքում դրայվերի ինտեգրալ սխեման կարող է վնասվել։ Խորհուրդ է տրվում շարժիչի լարերը միացնել՝ դրական լարումը միացնելով կարմիր (+) լարին, իսկ բացասական լարումը՝ սև (-) լարին։
Փոքր անխոզանակ շարժիչը կոմպակտ չափի անխոզանակ հաստատուն հոսանքի (BLDC) շարժիչ է, որը նախատեսված է այնպիսի կիրառությունների համար, որտեղ տարածքը, արդյունավետությունը և դիմացկունությունը կարևոր են: Ի տարբերություն խոզանակային շարժիչների, այն վերացնում է ֆիզիկական խոզանակները՝ հենվելով էլեկտրոնային կոմուտացիայի վրա: Այս շարժիչները նախագծված են մանրացված լինելու համար (հաճախ 5-12 մմ տրամագծով), միաժամանակ ապահովելով բարձր արդյունավետություն, ինչը դրանք իդեալական է դարձնում կրելի սարքերի, բժշկական գործիքների և կոմպակտ էլեկտրոնիկայի նման սարքերի համար:
Փոքր BLDC շարժիչը աշխատում է էլեկտրոնային կոմուտացիայի միջոցով (առանց ֆիզիկական խոզանակների): Ահա պարզեցված վերլուծությունը.
- Այն բաղկացած է ստատորից (պղնձե փաթույթներով) և ռոտորից (մշտական մագնիսներով):
- Կառավարիչը (վարորդը) էլեկտրական ազդանշաններ է ուղարկում ստատորի փաթույթներին՝ ստեղծելով պտտվող մագնիսական դաշտ։
- Այս մագնիսական դաշտը փոխազդում է ռոտորի մշտական մագնիսների հետ, ինչի հետևանքով ռոտորը պտտվում է։
- Սենսորները (կամ առանց սենսորների ալգորիթմները) հայտնաբերում են ռոտորի դիրքը, թույլ տալով կարգավորիչին կարգավորել հոսանքի ուղղությունը ստատորի փաթույթներում՝ ապահովելով անընդհատ, հարթ պտույտ։
Այս դիզայնը վերացնում է խոզանակների մաշվածությունը, ինչը հանգեցնում է ավելի երկար ծառայության ժամկետի, ավելի բարձր արդյունավետության և ավելի անաղմուկ աշխատանքի՝ խոզանակներով շարժիչների համեմատ:
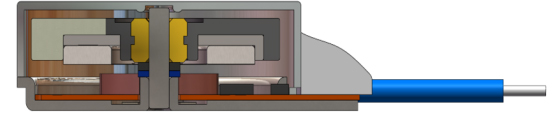
Միկրո անխոզանակ վիբրացիոն շարժիչն ունի կոմպակտ, հարթ շրջանաձև կառուցվածք, որը օպտիմալացված է սահմանափակ տարածքի կիրառման համար: Այն բաղկացած է.
- Ստատոր. մանրանկարչական տպագիր միացման տախտակ (PCB)՝ ինտեգրված պղնձե փաթույթներով, որը կազմում է էլեկտրամագնիսական կծիկների զանգված։
- Ռոտոր. Մետաղադրամի ձև ունեցող հավաքվածք՝ մշտական մագնիսներով (սովորաբար հազվագյուտ հողային մագնիսներ՝ բարձր պտտող մոմենտի խտության համար) և էքսցենտրիկ զանգվածով (պտտման ժամանակ թրթռում առաջացնելու համար):
- Էլեկտրոնային կոմուտացիոն համակարգ. Ներկառուցված սենսորներ (կամ առանց սենսորների կառավարման ալգորիթմներ) և շարժիչային միացում՝ ստատորի փաթույթներում հոսանքի հոսքը կառավարելու համար, վերացնելով ֆիզիկական խոզանակները։
Ստատորի փաթույթները հաջորդաբար լիցքավորվում են կոմուտացիոն համակարգով՝ ստեղծելով պտտվող մագնիսական դաշտ: Այս դաշտը փոխազդում է ռոտորի մշտական մագնիսների հետ՝ ստիպելով ռոտորին (իր էքսցենտրիկ զանգվածով) պտտվել: Էքսցենտրիկ զանգվածի անհավասարակշիռ պտույտը առաջացնում է թրթռում, որը հպտիկ հետադարձ կապի կամ մեխանիկական խթանման միջուկի մեխանիզմն է:
Հաստատուն հոսանքի անխոզանակ վիբրացիոն շարժիչը աշխատեցնելու համար ձեզ անհրաժեշտ է BLDC շարժիչի դրայվեր (կառավարիչ), որը կատարում է երեք հիմնական խնդիր՝
1. Ռոտորի դիրքի չափում. Մեքենան օգտագործում է Հոլի էֆեկտի սենսորներ (կամ առանց սենսորների ալգորիթմներ, ինչպիսին է հակադարձ էլեկտրամագնիսական դաշտի հայտնաբերումը)՝ ռոտորի դիրքը հետևելու համար:
2. Կոմուտացիա. Ռոտորի դիրքից ելնելով՝ շարժիչը փոխում է հոսանքի ուղղությունը ստատորի փաթույթներում՝ պահպանելով պտտվող մագնիսական դաշտը։
3. Արագության/ինտենսիվության կառավարում. Ստատորին մատակարարվող լարումը կամ հոսանքը կարգավորելով՝ շարժիչը կարգավորում է շարժիչի պտտման արագությունը՝ այդպիսով կարգավորելով տատանումների ինտենսիվությունը։
Ինտեգրման համար շարժիչը միանում է շարժիչի սնուցման և ազդանշանային տերմինալներին (օրինակ՝ FPCB միակցիչներ կամ հաղորդալարեր), և համակարգի գլխավոր կառավարիչը հրամաններ է ուղարկում (օրինակ՝ PWM ազդանշաններ) շարժիչին՝ տատանումների օրինաչափությունները կամ ինտենսիվությունը կարգավորելու համար։