

Motores fere ubique inveniri possunt. Hic dux te adiuvabit ut fundamenta motorum electricorum, genera praesto, et quomodo motorem rectum eligas discas. Quaestiones fundamentales quibus respondendum est dum decernitur quis motor aptissimus sit ad applicationem sunt quem typum eligere debeam et quae specificationes valent.
Quomodo motores operantur?
Motor electricus vibransOperantur convertendo energiam electricam in energiam mechanicam ut motum creet. Vis intra motorem generatur per interactionem inter campum magneticum et currentem alternantem (AC) vel directum (DC) convolutionis. Cum vis currentis crescit, ita etiam vis campi magnetici crescit. Legem Ohmi (V = I*R) in mente habe; tensio electrica crescere debet ut eadem vis currentis maneat cum resistentia crescit.
Motores ElectriciUsus varios habent. Usus industriales consueti includunt sufflatores, instrumenta machinalia et electrica, ventilatores et antlias. Periti amatores plerumque motores in applicationibus minoribus motum requirentibus utuntur, ut robotica vel moduli cum rotis.
Genera motorum:
Multae sunt species motorum DC, sed frequentissimae sunt vel penicillatae vel sine penicilla. Sunt etiammotores vibrantes, motores graduales, et motores servomotores.
Motores penicilli DC:
Motores DC penicillati inter simplicissima sunt et in multis instrumentis, ludicris, et autocinetis inveniuntur. Penicillis contactu utuntur quae cum commutatore coniunguntur ad directionem currentis mutandam. Vili pretio producuntur et faciles ad regendum, et momentum electricum optimum habent ad celeritates parvas (mensuratae in revolutionibus per minutum vel RPM). Pauca incommoda sunt quod constantem curam requirunt ad penicilla detrita substituenda, celeritatem limitatam habent propter calefactionem penicillatorum, et sonitum electromagneticum ex arcu penicillatorum generare possunt.
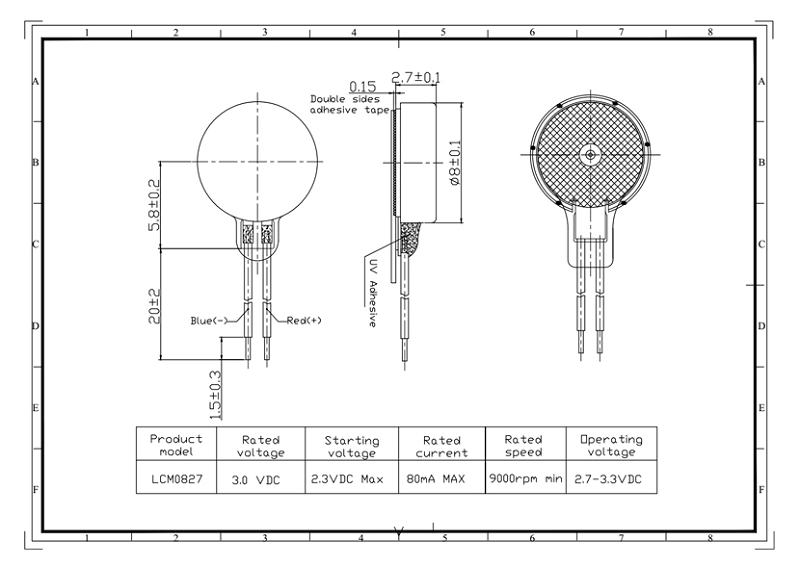
Motor vibrationis nummi minimi 3V 8mm, motor electricus vibrans minimus planus 0827
Motores DC sine spazzolis:
Optimus motor vibransMotores DC sine spazzolis magnetibus permanentibus in rotore suo utuntur. In foro oblectationis pro applicationibus aëronauticis et vehiculis terrestribus populares sunt. Efficaciores sunt, minus curae requirunt, minus strepitus generant, et densitatem potentiae maiorem habent quam motores DC cum spazzolis. Etiam in serie produci possunt et motori AC cum constanti RPM similes, nisi quod a currente DC agunt. Sunt tamen nonnulla incommoda, quae includunt eos difficiles esse ad regendum sine regulatore speciali et onera initialia parva et capsas rotarum speciales in applicationibus impulsoriis requirunt, quae eos maiores sumptus capitales, complexitatem, et limitationes ambientales habent.
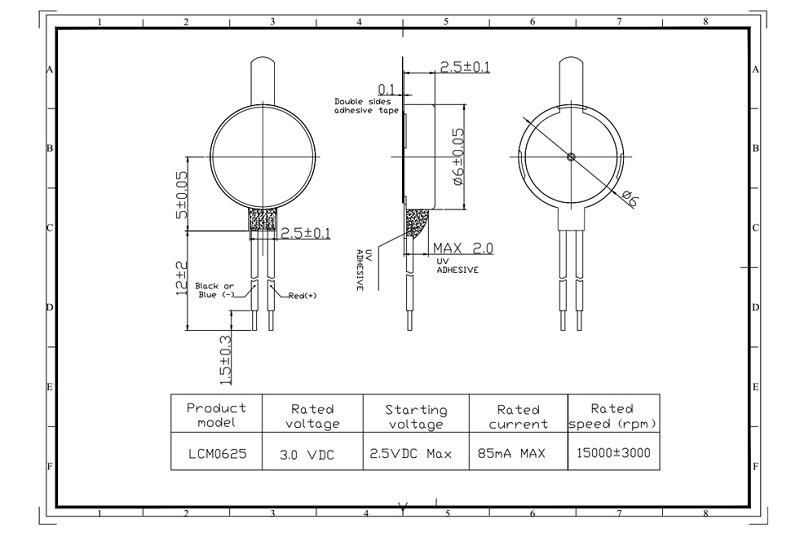
Motor electricus vibrans BLDC 3V 6mm motoris plani DC sine spazzolis 0625
Motores graduales
Vibratio motoris gradualisg adhibentur ad usus vibrationem requirentes, ut in telephonis mobilibus vel moderatoribus ludorum electronicorum. A motore electrico generantur et massam inaequalem in axe impulsori habent, quae vibrationem efficit. Etiam in sibilis non electronicis adhiberi possunt, qui vibrant ad sonum producendum vel ad alarmum vel tintinnabula ianuarum.
Quotiescumque accurata positio agitur, motores graduales amici tui sunt. In typographis, machinis instrumentis, et typographis inveniuntur.
Systemata moderationis processus ad magnum momentum tenendum constructa sunt, quod usori facultatem dat ab uno gradu ad proximum progrediendi. Systema moderatorium habent quod positionem per impulsus signorum ad rectorem missi designat, qui eos interpretatur et proportionalem tensionem ad motorem mittit. Relative simplices sunt ad fabricandum et moderandum, sed maximum currentem constanter trahunt. Parva distantia graduum celeritatem maximam limitat et gradus sub magnis oneribus omitti possunt.
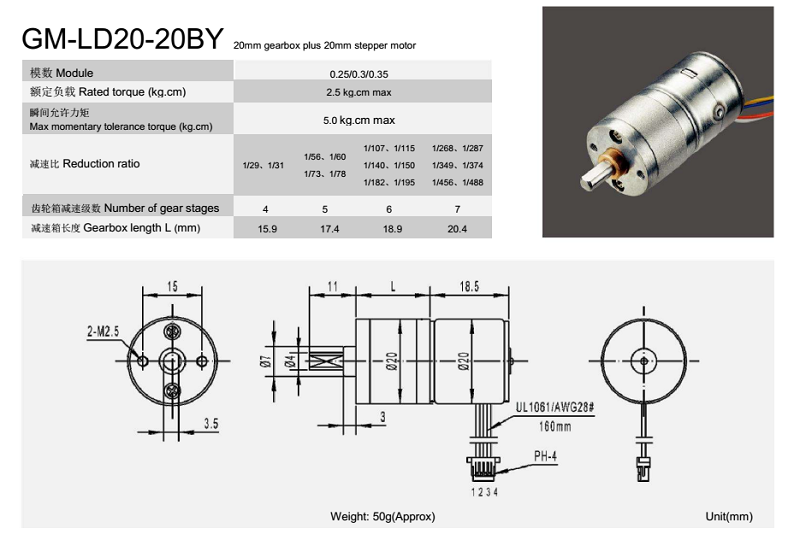
Pretium Inferius Motoris Gradarii DC cum Capsa Dentata ex Sina GM-LD20-20BY
Quae consideranda sunt cum motorem emis:
Plures sunt proprietates quibus attendere debes cum motorem eligis, sed tensio, fluxus electricus, momentum rotationis, et velocitas (RPM) gravissimae sunt.
Fluxus electricus est qui motorem agit, et nimium fluxum electricum motorem laedet. Pro motoribus DC, fluxus electricus operandi et stagnans magni momenti sunt. Fluxus electricus operandi est media quantitas fluxus electrici quem motor sub momento torquenti typico haurire exspectatur. Fluxus stagnans satis momenti electrici applicat ut motor celeritate stagnanti, sive 0 RPM, currat. Haec est maxima quantitas fluxus electrici quam motor haurire debet, necnon maxima potentia cum per tensionem nominalem multiplicatur. Dissipatores caloris magni momenti sunt ad motorem constanter actum faciendum vel ad tensionem altiorem quam nominalem actum faciendum ne spirae liquefiant.
Tensio electrica adhibetur ad fluentem currentem electricum in unam partem servandum et ad currentem inversum superandum. Quo altior tensio, eo altior momentum torquens. Aestimatio tensionis motoris DC efficacissimam tensionem indicat dum currit. Fac ut tensionem commendatam adhibeas. Si nimis pauca volta adhibeas, motor non operabitur, cum nimis multi voltae spiras in circuitum brevem ducere possint, quod ad iacturam potentiae vel destructionem completam ducit.
Valores operandi et retardationis etiam cum momento torquendi considerandi sunt. Momentum torquendi operandi est quantitas momenti torquendi quam motor dare destinatus est, et momentum torquendi retardationis est quantitas momenti torquendi producta cum potentia ex celeritate retardationis applicatur. Semper momentum torquendi operandi requisitum considerare debes, sed aliquae applicationes te requirent scire quam longe motorem impellere possis. Exempli gratia, cum roboto rotato, bonum momentum torquendi bonae accelerationi aequat, sed curare debes ut momentum torquendi retardationis satis validum sit ad pondus roboti elevandum. Hoc in casu, momentum torquendi maioris momenti est quam celeritas.
Velocitas, sive celeritas (RPM), in motoribus complexa esse potest. Regula generalis est motores efficacissime ad maximas celeritates currere, sed non semper fieri potest si rotae dentatae requiruntur. Addendo rotas dentatas efficientiam motoris minuetur, ergo celeritatis et momenti reductionem etiam in rationem ducenda sunt.
Haec sunt fundamenta consideranda dum motorem eligis. Propositum applicationis et quam vim electricam adhibeat considera ut genus motoris aptum eligas. Specificationes applicationis, ut tensio, vis electrica, momentum torquens, et velocitas, determinabunt quis motor aptissimus sit, ergo requisitis eius attende.

Anno MMVII condita, Leader Microelectronics (Huizhou) Co., Ltd. est societas internationalis quae investigationem et progressionem (R&D), productionem et venditionem integrat. Praecipue producimus...motor planus, motor linearis, motor sine spazzolis, motor sine nucleo, motor SMD, motor aëris simulans, motor retardationis et cetera, necnon motor micro in applicatione multi-campi.
Nobiscum contactum fac ut pretium quantitatum productionis, adaptationum et integrationis accipias.
Tempus publicationis: XXI Februarii, MMXIX



