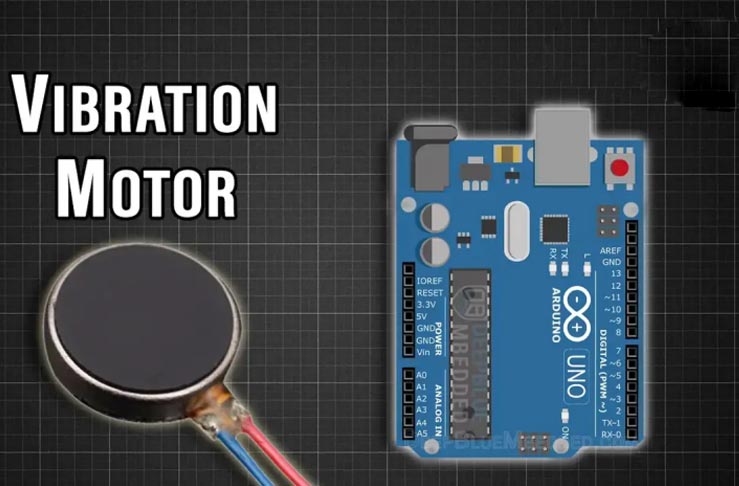
Arduino wibrasiýa motorlary - Taslamalaryňyz üçin ýörite we ýokary hilli çözgütler
An Arduino titreme motoryüçin ýörite döredilen kiçi motordyrArduino taslamalary, haptik tesellini işjeňleşdirmek, duýduryş funksiýalary, ýa-dadinamiki täsirlerTogy dolandyrmak arkaly ol titremeleri döredýär we robototehnikada, elektron DIY toplumlarynda, bilim enjamlarynda we sensorly teslim ulgamlarynda giňden ulanylýar. Onuň bilenkiçi ölçegli, az energiýa sarp edilişi, weaňsat integrasiýa, bu öndürijiler we inženerler üçin ideal saýlawdyr.
Arduino wibrasiýa motorlarynyň professional öndürijisi hökmünde,Liderajaýyp önümleri hödürlemek üçin köp ýyllyk senagat tejribesini we öňdebaryjy tehnologiýalary getirýär. Biziň motorlarymyz şeýle ýasalýarýokary hilli materiallar, pes ses hödürleýär, uzak ömür, weýokary durnuklylykdürli ulanylyşlara laýyk gelýär. “Leader” şeýle hem, şol sanda toplumlaýyn özleşdirme hyzmatlaryny hödürleýärululyk, güýç, wetitreme ýygylygy, müşderileriň özboluşly talaplaryny kanagatlandyrmak üçin. Iň döwrebap önümçilik desgalary we berk hil gözegçiligi bilen, köp mukdarda sargytlaryň wagtynda eltip berilmegini üpjün edýäris.
Ýokary hilli we deňsiz-taýsyz ygtybarlylyk üçin Lider saýlaň!
Arduino wibrasiýa motorynyň tehniki aýratynlyklary
Nominal woltlylyk:1.2 – 3.7VDC (adaty 3V)
Nominal Tok:80mA @ 3V


Gözleýän zadyňyzy henizem tapmadyňyzmy? Elýeterli önümler üçin maslahatçylarymyz bilen habarlaşyň.
Arduino titreme hereketlendirijisiniň güýjüni dolandyrmak
Biz ulanyp bilerisArduino PWMwibrasiýa motorynyň wibrasiýa intensiwligini dolandyrmak üçin çykyşlar. Üýtgeýän iş siklini ulanmak arkalyPWM signalyArduino bilen birleşdirilenBJT tranzistor çykyş sürüjisi, biz motorda sazlanyp bilinýän titreme intensiwligini gazanyp bileris.
Titreşmäniň intensiwligini dolandyrmak üçin PWM signalyny ulananda, titreşme hereketlendirijisine parallel Fly-Back Diodyny birikdirmek maslahat berilýär. Bu diod çykyş hereketlendirijisi tranzistoryny hereketlendiriji tarapyndan döredilýän induktiw çişlerden goraýar.
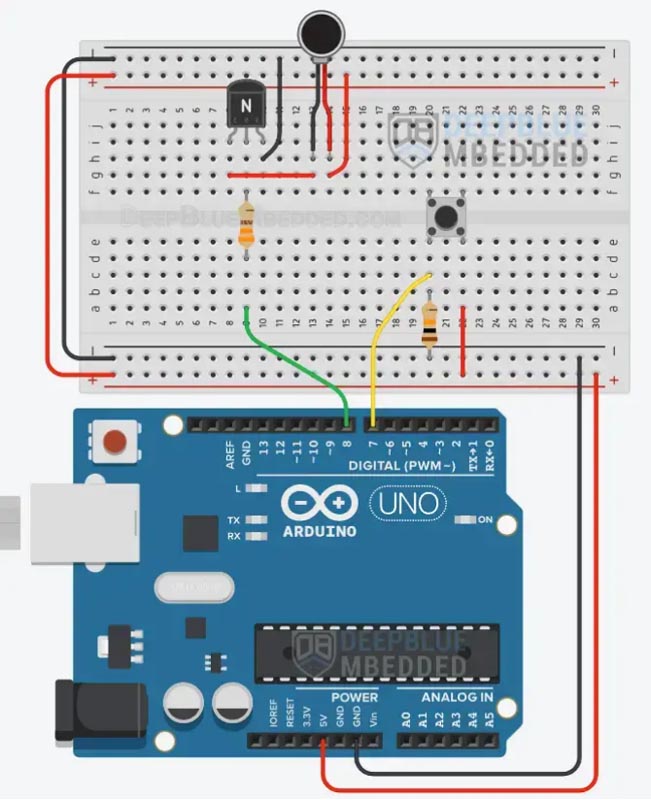
Arduino titreme hereketlendirijisiniň diagrammasy
Arduino elýeterli bahadan we uly we işjeň jemgyýet tarapyndan goldanylýan ulanyjy üçin amatly işläp düzmek platformasydyr. Onuň meşhurlygyny onuň ýönekeýligi bilen baglanyşdyryp bolýar - mikrokontroller gönüden-göni platada ýerleşdirilen we programmalaşdyrmak üçin zerur bolan ähli zerur komponentler eýýäm goşulandyr. Size diňe USB-ni kompýuteriňize birikdirip, programma üpjünçiligini göçürip almak gerek.
Dürli ulanyşlar üçin köp görnüşli Arduino bar. Iň meşhury Arduino UNO R3. Şeýle-de bolsa, motory hereketlendirmek üçin mikrokontroller ulanylanda bilmeli bir esasy çäklendirme bar: DC wibrasiýa motorlarynyň köpüsinde mikrokontroller pinleriniň çykyş tok mümkinçiliginden ýokary bolan başlangyç we iş toklary gerek. Bu bolsa, mikrokontroller bilen motoryň arasynda aralyk komponentiň gerekdigini aňladýar. Biz "komponent" terminini giňden ulanýarys, sebäbi ýörite sürüjiler ýa-da haptik teslim çipleri ýaly köp sanly wariantlar bar. Bu gollanmany ýönekeý we düşnükli etmek üçin, biz tranzistorlaryň ulanylyşyna üns bereris.
Arduino zynjyrynyň wibrasiýa motorynyň 4 esasy elementi bar:
●Mikrokontroller
●Tranzistor
●Titreme motory
●Tok çeşmesi
Bu, hereketlendiriji açar hökmünde tranzistor ulanýan wibrasiýa motorynyň Arduino dolandyryş zynjyry üçin simleriň diagrammasydyr. Wibrasiýa motorynyň Arduino UNO platasyndan 5V DC güýjüni alýan tranzistor tarapyndan işleýändigini bellemek möhümdir. Başgaça aýdylanda, wibrasiýa motoryny has pes, ýöne howpsuz usulda işletmek üçin 3.3V çykyş pinini ulanyp bileris.
Arduino bilen wibrasiýa motoryny nädip sürmeli
A titreme motoryhereketlendiriji walda deňagramly bolmadyk massasy bolan elektrik hereketlendirijisini ulanyp, mehaniki titreme döredýän ykjam enjamdyr. Ol esasan dürli ulanylyşlarda ulanyjy interfeýsini ahyrky ulanyjy üçin has özüne çekiji etmek üçin taktil seslenme bermek maksady bilen ulanylýar.
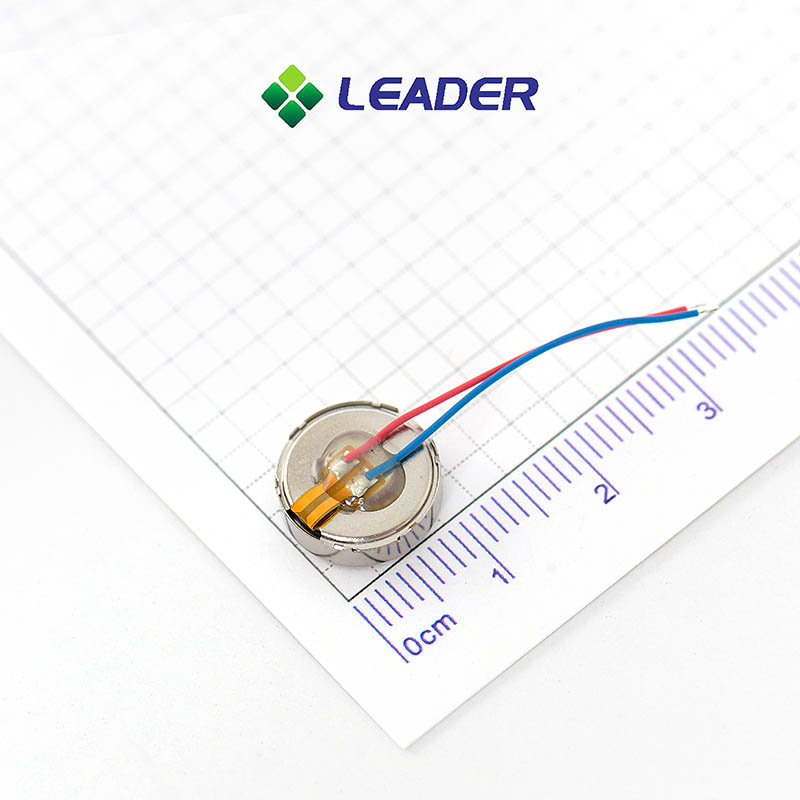
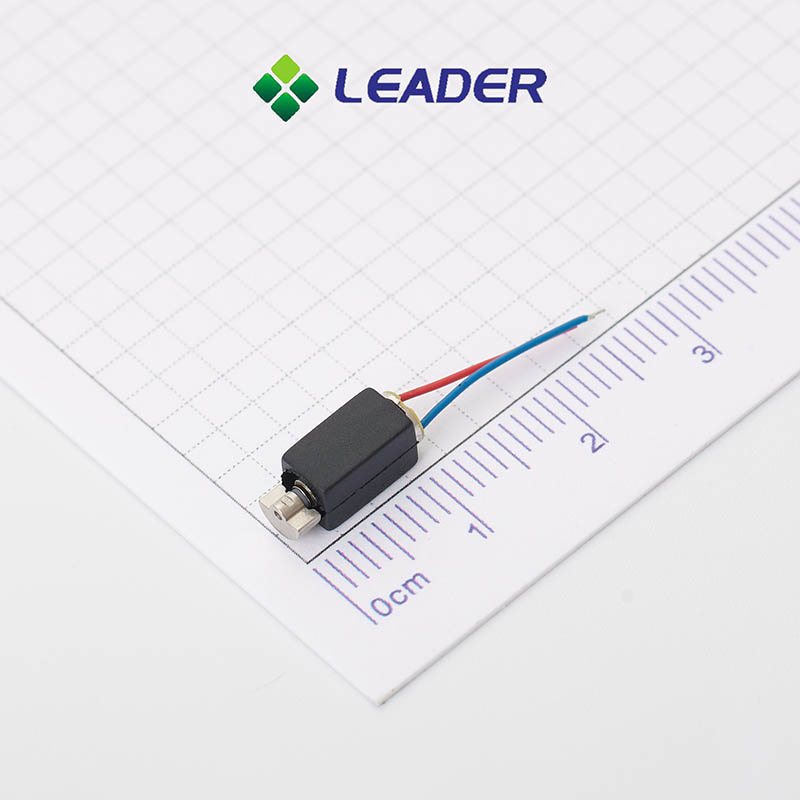
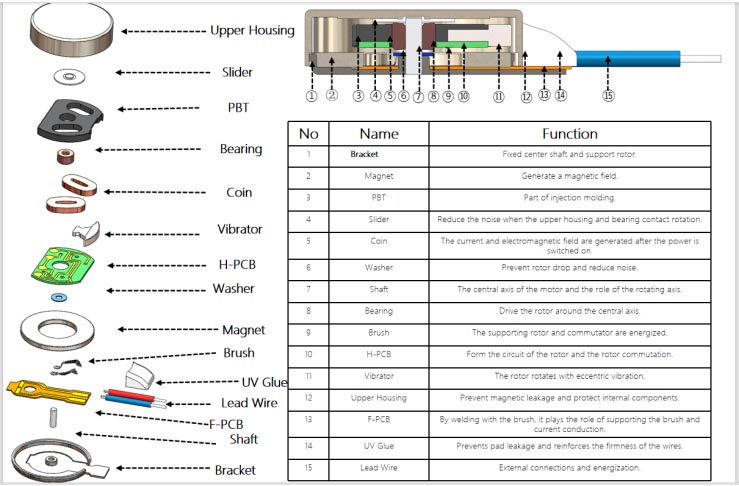
Ýokardaky suratda dürli Arduino taslamalarynda ulanylýan mikro-wibrasiýa hereketlendirijilerine meňzeş, mobil telefonlarda giňden ýaýran kiçi wibrasiýa hereketlendirijisiniň içki gurluşy görkezilýär. Aşakda dürli mikrokontrollerlere aňsat birikmek üçin sürüji tranzistor dolandyryş zynjyry bilen enjamlaşdyrylan, PCB-e lehimlenen kiçi wibrasiýa hereketlendirijisiniň suraty görkezilen.
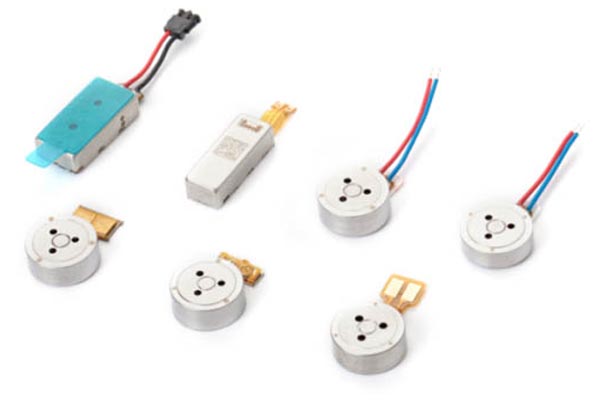
Titreşimli motorlary öz içine alýan ähli ulanylyşlar diýen ýaly mikrokontrollerleri ulanýar. Käbir senagat ulanylyşlary titreşimli motoryň üznüksiz işlemegini talap edip biler (bu ýagdaýda biz ulanmagy maslahat berýäris)çotkasyz wibrasiýa motory), köpüsi titreşmäniň belli bir aralyklarda we belli bir wagt aralygynda bolmagyny talap edýär. Çipleriň bahasy we ölçegleri pese gaçdygyça, bu ulgamlara mikrokontrollerlere girmek we olary goşmak örän aňsatlaşdy.
Arduino üçin mini wibrasiýa motoryny nädip saýlamaly?
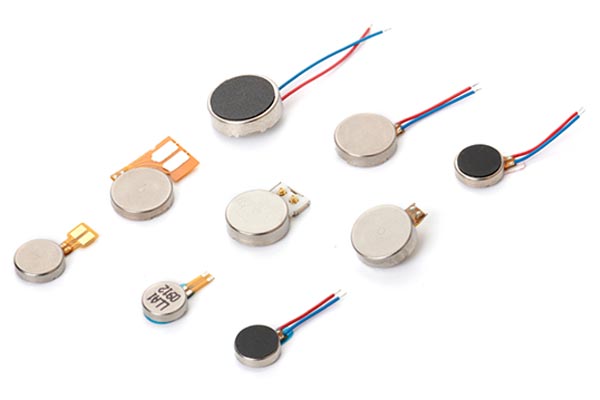
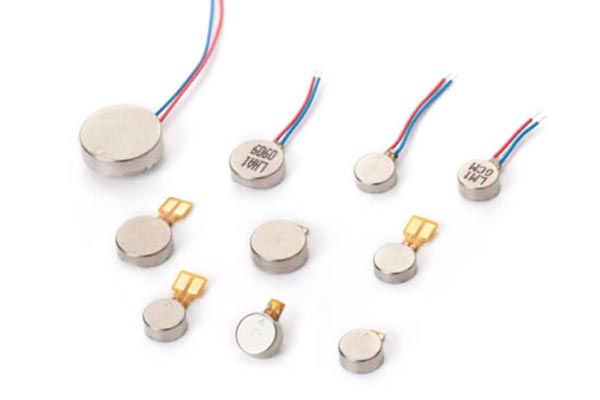
Titreşimli motorlaryň dürli görnüşleri bar. Biz teňňe görnüşli arduino titreşimli motoryny maslahat berýäris.Teňňe motorlarykiçi we adatça kiçi enjamlarda ulanylýar.
Motoryň naprýaženiýesiniň we tok derejesiniň Arduino plataňyza we elektrik üpjünçiligiňize laýyk gelýändigine göz ýetiriň.
Motoryň titreme güýjüniň aýratynlyklaryny, adatça, barlaňG-güýç ýa-da m/s²Taslamaňyz üçin titreme güýjüniň talaplaryna laýyk gelýän motory saýlaň.
Motoryň fiziki ölçeglerini we agramyny göz öňünde tutuň, esasanam taslamaňyzyň giňişlik çäklendirmeleri bolsa ýa-da ýeňil agram talap etse.
Eger titreme intensiwligini dinamiki taýdan sazlamagy meýilleşdirýän bolsaňyz, motoryň aňsatlyk bilen dolandyrylyp bilinjekdigine göz ýetiriňPWM signaly.
Taslamaňyzda motoryň nähili gurnaljakdygyny barlaň. Käbir motorlar gurnamagy aňsatlaşdyrmak üçin gurnama deşikleri ýa-da ýelmeşdiriji arka tarap bilen gelýär.
Ahyrsoňy, býujetiňizi we üpjün edijiňizden elýeterli motorlary göz öňünde tutuň. Hili we ygtybarlylygyny üpjün etmek üçin abraýly brendi gözläň.
Arduino wibrasiýa motoryny nähili özleşdirmeli?
Taslamaňyzyň aýratynlyklaryna laýyk gelýän wibrasiýa motoryny saýlaňululygy, naprýaženiýesi we titreme intensiwligi.
UlanyşPWM (Impuls giňligi modulýasiýasy)motoryň titreme intensiwligini dolandyrmak üçin. Bu size titreme intensiwligini üýtgetmek üçin iş siklini sazlamaga mümkinçilik berýär.
Arduino, tranzistor (ýa-da motor sürüjisi) we naprýaženiýesiniň ýokarlanmagynyň öňüni almak üçin yzyna gaýtýan diody öz içine alýan zynjyr dörediň. Motory Arduino-dan PWM signaly bilen dolandyryljak tranzistor bilen birikdiriň.
Arduino IDE-de motory dolandyrmak üçin programma ýazyň. Tranzistora PWM signalyny ibermek we titreme intensiwligini üýtgetmek üçin iş siklini sazlamak üçin `analogWrite()` funksiýasyny ulanyň.
Zerur bolanda, real wagt maglumatlaryna esaslanyp, dinamiki sazlamalara mümkinçilik berýän titreme derejeleri barada pikir alyşmak üçin sensorlar (meselem, akselerometrler) goşulyp bilner.
Motoryň netijeliligini ýokarlandyrmak we titreme tejribesini öz zerurlyklaryňyza laýyklaşdyrmak üçin dürli gurnama usullaryny ýa-da korpuslaryny synap görüň.
Islenýän netijä ýetmek üçin gurluşyňyzy barlaň we kody, zynjyry ýa-da fiziki konfigurasiýany gerek bolsa sazlaň.
Näme üçin bizi Arduino Motor üpjün edijisi hökmünde saýlamaly?
hökmündeArduino motor üpjün edijisi, LEADER motoryarduino bilen wibrasiýa motorynyň ygtybarly zawodydyr. Önümlerimiziň birnäçe esasy artykmaçlyklary bar:
Dürli programmalaryň özboluşly talaplarynyň bardygyny düşünýäris. Şonuň üçin biz wibrasiýa motorlarymyz üçin dürli sazlama opsiýalaryny hödürleýäris. Müşderiler şeýle parametrleri kesgitläp bilerler.ölçegi, naprýaženiýesi, titreme intensiwligi we gurnama konfigurasiýasymotoryň olaryň aýratyn zerurlyklaryna doly laýyk gelýändigini üpjün etmek üçin. Bu çeýelik taslamaňyzyň işini gowulandyrýan özleşdirilen çözgütleri döretmäge mümkinçilik berýär.
Biziň wibrasiýa motorlarymyz uzak wagtlap işlemek üçin niýetlenendir. Olar şundan ýasalýarýokary hilli materiallar we berk inženerçilikdürli gurşawlarda uzak möhletli ulanmaga çydamly. Bu berklik olary uzak möhletli ygtybarly işlemegi talap edýän ulanyşlar üçin amatly edýär we ýygy-ýygydan çalşyrmagyň we tehniki hyzmatyň zerurlygyny azaldýar.
LIDER-iňmikro-titreme motorlarybilen işleşörän az ses, olary takyk ulanylyşlar üçin ideal edýär. Bu aýratynlyk, esasanam, lukmançylyk enjamlary, sarp ediş elektronikasy we sessiz işlemegi talap edýän beýleki duýgur ulanylyşlar ýaly gurşawlarda peýdalydyr.
Özara utgaşyklylygy we öndürijiligi üpjün etmek üçin,biz wibrasiýa motorlarymyz üçin nusga synaglaryny hödürleýärisMüşderiler has uly borçnama kabul etmezden ozal, motoryň öz ulgamy bilen nähili derejede integrasiýa boljakdygyny bahalandyrmak üçin nusgalary sorap bilerler. Bu synag tapgyry önümlerimiziň siziň ulanyşyňyzyň anyk talaplaryna laýyk gelýändigini tassyklamaga kömek edýär we satyn alanyňyzda size rahatlyk berýär.

Gözleýärinygtybarly mikro motorlar? Biziň nähilipeýjer motorlaryykjam we netijeli wibrasiýa çözgütlerini hödürleýär.
Liderleriňiziň hünärmenleri bilen maslahatlaşyň
Biz özensiz motorlaryňyza gerek bolan hili we gymmaty wagtynda we býujete laýyklykda üpjün etmek üçin size kynçylyklaryň öňüni almaga kömek edýäris.