

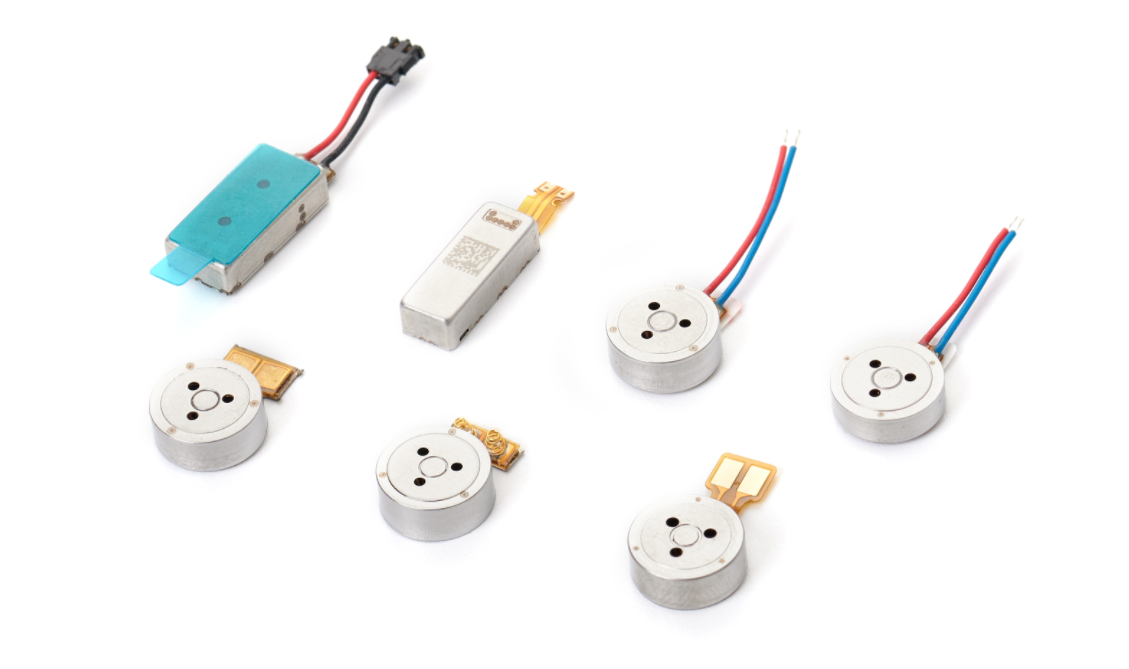
Àwọn mọ́tò ìgbóná onílà, tí a tún mọ̀ sí àwọn actuators onílà onílà (LRA)Àwọn mọ́tò ìgbìn tí a tún mọ̀ sí àwọn ohun èlò ìgbìn tí a ń pè ní linear resonant actuators (LRA), jẹ́ àwọn ẹ̀rọ tí ó ní ìwọ̀nba, tí ó lágbára, tí ó sì gbéṣẹ́ tí a ń lò nínú onírúurú ẹ̀rọ àti àwọn ohun èlò itanna. A ṣe àwọn mọ́tò wọ̀nyí láti ṣe ìgbìn tí ó ní ìwọ̀nba, èyí tí ó mú kí wọ́n dára fún onírúurú ohun èlò tí ó nílò ìgbìn tí ó péye àti tí a ń ṣàkóso.
Ilana Iṣiṣẹ
Mọ́tò ìgbóná LRAjẹ́ mọ́tò ìgbì tí ó ń mú agbára ìyípadà jáde kọjá axis kan ṣoṣo. Láìdàbí mọ́tò DC eccentric rotating mass (ERM), actuator linear resonant kan gbára lé fóltéèjì AC láti wakọ̀ ohùn tí a tẹ̀ mọ́ ibi tí ń gbéra tí a so mọ́ ìsun omi kan.
Àwọn Ìṣẹ̀lẹ̀ Ìlò
A le lo awọn mọto gbigbọn laini ni ọpọlọpọ awọn ẹrọ, pẹlu awọn foonu alagbeka, awọn ohun elo ti a fi n wọ, awọn oludari ere, awọn ẹrọ iṣoogun, ati awọn eto esi ifọwọkan. A lo wọn lati pese esi haptic, awọn iwifunni itaniji, ati awọn wiwo olumulo ti o da lori gbigbọn ninu awọn ẹrọ wọnyi, nitorinaa mu iriri olumulo pọ si ati mu iṣẹ ṣiṣe ẹrọ naa dara si.
Awọn ẹya ara ẹrọ pataki:
Àwọn ẹ̀rọ ìgbóná onílànàpese ọpọlọpọ awọn anfani ti o jẹ ki wọn dara fun awọn ohun elo oriṣiriṣi.
-Lákọ̀ọ́kọ́, wọ́n kéré jọjọ, wọ́n sì fẹ́ẹ́rẹ́fẹ́, èyí sì mú kí wọ́n rọrùn láti fi sínú àwọn ẹ̀rọ tó ṣeé gbé kiri.
-Pẹ̀lúpẹ̀lú, wọ́n ń lo agbára díẹ̀, èyí sì ń ran lọ́wọ́ láti mú kí bátírì pẹ́ sí i nínú àwọn ẹ̀rọ tí bátírì ń ṣiṣẹ́.
-Iṣakoso deede lori igbohunsafẹfẹ ati titobi gba laaye fun isọdi ati iṣapeye ti esi haptic.
-Síwájú sí i, àwọn mọ́tò ìgbìn tí ó wà ní ìlà máa ń mú ìgbìn jáde pẹ̀lú ìwọ̀n ìṣípo díẹ̀, èyí sì máa ń dín ewu ìbàjẹ́ sí àwọn èròjà onímọ̀lára kù.
Iyatọ laarin awọn ẹrọ LRA ati ERM
Ní ìfiwéra pẹ̀lú àwọn ẹ̀rọ ERM (eccentric rotating mass), àwọn LRA ní àwọn ànímọ́ tó yàtọ̀ síra. LRA máa ń mú ìgbì ní ìtọ́sọ́nà ìlà, nígbà tí àwọn ERM máa ń mú ìgbì ní ìyípo ibi-ìwọ̀n tí kò ṣe pàtàkì. Ìyàtọ̀ pàtàkì yìí ní ipa lórí irú ìdáhùn haptic tí wọ́n ń fúnni. Àwọn LRA sábà máa ń mú ìgbì tí ó ní ìtumọ̀ àti pípéye jáde, èyí tí ó ń jẹ́ kí a lè ṣàkóso rẹ̀ dáadáa nínú àwọn ohun èlò bíi àwọn ohun èlò ìfọwọ́sowọ́pọ̀ tàbí àwọn ẹ̀rọ virtual reality. Ní ọwọ́ kejì ẹ̀wẹ̀, àwọn ERM máa ń mú ìgbì tí ó lágbára jáde, èyí tí ó ń mú kí wọ́n yẹ fún àwọn ohun èlò tí ó nílò ìdáhùn ìfọwọ́sowọ́pọ̀ tí ó hàn gbangba, bíi àwọn ohun èlò ìfọwọ́sowọ́pọ̀ tàbí àwọn àmì ìdánilójú.
Sibẹsibẹ,Àwọn mọ́tò LRA ní àkókò tó gùn jù pẹ̀lú àwọn ìyípo tó ju mílíọ̀nù kan lọ.
Ní ìparí, àwọn mọ́tò ìgbóná líínì, tàbí àwọn actuator resonant linear, ń pese ìgbóná líínì tàbí ìdáhùn haptic ní ìtọ́sọ́nà líínìnì. Ìwọ̀n kékeré wọn, agbára lílò wọn tí ó kéré, àti àwọn ẹ̀yà ara tí a lè ṣe àtúnṣe wọn mú kí wọ́n jẹ́ ohun tí a ń wá kiri fún àwọn ohun èlò nínú ẹ̀rọ itanna oníbàárà, eré, àwọn ohun èlò tí a lè wọ̀, àti àwọn ìsopọ̀ haptic. Tí o bá nífẹ̀ẹ́ sí mọ́tò LRA yìí, jọ̀wọ́ kàn sí waÀwọn ẹ̀rọ olóríolùpèsè!
Kan si Awọn amoye Alakoso Rẹ
A n ran ọ lọwọ lati yago fun awọn ijamba lati pese didara ati idiyele ti nilo ẹrọ kekere brushless rẹ, ni akoko ati ni isunawo.
Àkókò ìfìwéránṣẹ́: May-11-2024



