

Els actuadors ressonants lineals (LRA) s'han convertit en components indispensables en els dispositius electrònics moderns, alimentant la retroalimentació hàptica que sentim en telèfons intel·ligents, dispositius portables, controladors de jocs i més. A diferència dels motors tradicionals de massa giratòria excèntrica (ERM) que es basen en pesos giratoris, els LRA funcionen segons el principi de la vibració ressonant, oferint sensacions tàctils precises, eficients i personalitzables. A continuació, es mostra un desglossament detallat de com funcionen els LRA, els seus components principals i la física que impulsa el seu rendiment.
Components bàsics d'unActuador ressonant lineal
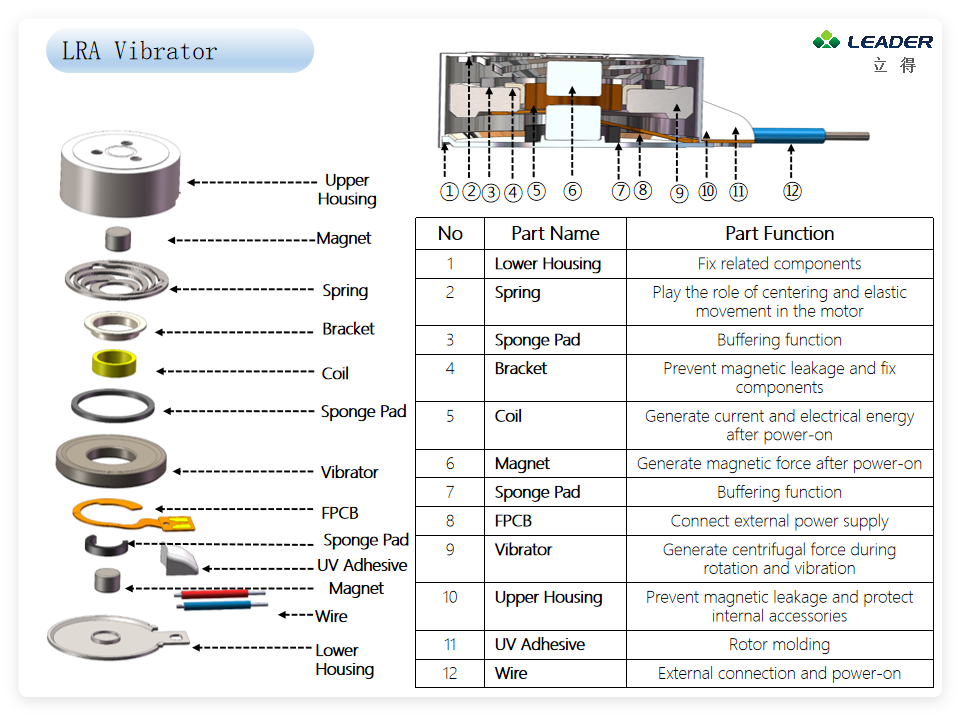
Per entendre el funcionament d'un LRA, primer és essencial examinar les seves parts clau, cadascuna dissenyada per permetre el moviment ressonant:
Conjunt d'imants: Normalment un imant permanent (sovint de neodimi per a una alta densitat de flux magnètic), aquest component forma la massa mòbil de l'LRA. Està suspès dins del dispositiu, cosa que li permet oscil·lar endavant i endarrere al llarg d'un únic eix lineal.
Bobina: Una bobina electromagnètica estacionària envolta el conjunt d'imants. Quan un corrent elèctric flueix a través de la bobina, genera un camp magnètic que interactua amb el camp de l'imant permanent; aquesta interacció és la força impulsora del moviment de l'LRA.
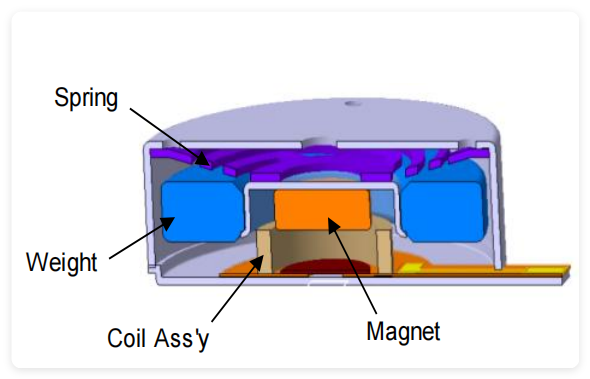
Sistema de suspensió: Compost per molles flexibles (sovint fetes de metall o polímer), el sistema de suspensió manté l'imant al seu lloc mentre permet un moviment lineal suau. També juga un paper fonamental en la definició de la freqüència de ressonància de l'LRA, ja que la rigidesa de la molla i la massa de l'imant determinen la freqüència natural a la qual el sistema vibra de manera més eficient.
Carcassa: Una carcassa exterior rígida envolta tots els components, proporcionant suport estructural i garantint que el moviment oscil·lant es transmeti eficaçment al dispositiu (i, en última instància, al tacte de l'usuari).
El principi fonamental de funcionament: ressonància i interacció electromagnètica
LRAmotor funcionen basant-se en dos fenòmens físics clau: la força electromagnètica i la ressonància mecànica. Aquí teniu un desglossament pas a pas del procés:
Generació de força electromagnètica: Quan s'aplica un voltatge a la bobina de l'LRA, hi flueix un corrent altern (CA). Segons la llei d'Ampère, aquest corrent crea un camp magnètic variable en el temps al voltant de la bobina. La direcció d'aquest camp magnètic canvia amb la polaritat del senyal de CA (per exemple, el corrent positiu crea un pol nord en un extrem de la bobina, mentre que el corrent negatiu l'inverteix a un pol sud).
Interacció i moviment magnètics: L'imant permanent dins de l'LRA està polaritzat (amb pols nord i sud), de manera que experimenta una força quan s'exposa al camp magnètic altern de la bobina. Quan el camp magnètic de la bobina s'alinea amb els pols de l'imant, l'imant és atret cap a la bobina; quan el camp magnètic s'inverteix, l'imant és empès cap a fora. Aquesta força d'anada i tornada fa que l'imant oscil·li linealment al llarg del seu eix.
Ressonància: Maximització de l'eficiència i l'amplitud: El motor linealestà dissenyat per funcionar a la seva freqüència de ressonància mecànica, és a dir, la freqüència natural a la qual el sistema de suspensió i la massa magnètica vibren amb una entrada d'energia mínima. A la ressonància, la impedància del sistema es minimitza, és a dir, la major part de l'energia elèctrica subministrada a la bobina es converteix en vibració mecànica (en lloc de perdre's com a calor). Això resulta en amplituds de vibració més grans i una eficiència més alta en comparació amb el funcionament no ressonant. Per exemple, un LRA típic per a telèfons intel·ligents té una freqüència de ressonància entre 100 i 200 Hz, que està optimitzada per a la percepció tàctil humana.
Amortiment i control: Tot i que la ressonància augmenta l'eficiència, també requereix un control precís per evitar vibracions inestables. La majoria dels LRAmotors es combinen amb controladors dedicats (com ara el DRV2605 o el DRV2625 de Texas Instruments) que regulen la freqüència i l'amplitud del senyal de CA. Aquests controladors garanteixen que l'LRA funcioni exactament a la seva freqüència de ressonància (compensant les variacions de fabricació o els canvis de temperatura) i permeten una intensitat de vibració ajustable, des de tocs subtils (per exemple, alertes de notificació) fins a polsos forts (per exemple, comentaris de jocs).
Avantatges clau dels LRA respecte a altres tecnologies hàptiques
El principi de funcionament ressonant proporciona als LRA diversos avantatges que els fan ideals per a l'electrònica de consum:
Precisió: els LRA vibren al llarg d'un únic eix lineal, produint una resposta tàctil consistent i predictible sense el "bruit" rotacional dels motors ERM. Això els fa perfectes per a aplicacions que requereixen sensacions matisades, com ara la hàptica de la pantalla tàctil o les pressions virtuals de botons.
Eficiència: En aprofitar la ressonància, els LRA consumeixen menys energia que els ERM per a la mateixa amplitud de vibració. Això és fonamental per a dispositius alimentats per bateria com ara telèfons intel·ligents i dispositius portables, on l'eficiència energètica és una prioritat màxima.
Mida compacta: Els LRA tenen un disseny prim i pla (sovint de només uns mil·límetres de gruix) que s'adapta fàcilment a carcasses de dispositius estretes. El seu moviment lineal també elimina la necessitat de peces giratòries, reduint la mida i el pes totals.
Temps de resposta ràpid: L'imant lleuger i el disseny de baixa inèrcia dels LRA permeten que comencin i deixin de vibrar gairebé a l'instant. Això permet una resposta ràpida i seqüencial (per exemple, escriure en un teclat virtual) que es percep com a natural i sensible.
Aplicacions del món real
Els LRA són omnipresents en la tecnologia moderna i milloren les experiències dels usuaris en totes les indústries:
Electrònica de consum: telèfons intel·ligents (per exemple, amb retroalimentació hàptica per escriure, navegar o jugar), rellotges intel·ligents (per exemple, alertes per vibració per a trucades o fites de fitness) i tauletes.
Jocs: Controladors per a consoles i jocs per a mòbils, on la precisió hàptica (per exemple, la simulació d'impactes, terreny o retrocés d'armes) submergeix els jugadors en la jugabilitat.
Automoció: Pantalles tàctils i sistemes d'infoentreteniment en cotxes, que proporcionen confirmació tàctil per a la pulsació de botons per reduir la distracció del conductor.
Dispositius portàtils i mèdics: monitors d'activitat física, audiòfons i monitors mèdics, on vibracions discretes proporcionen alertes importants sense àudio.
Conclusió
Els actuadors ressonants lineals revolucionen la retroalimentació hàptica combinant la tecnologia electromagnètica amb la ressonància mecànica, oferint solucions de vibració eficients, precises i compactes. En comprendre els seus components principals (imant, bobina, suspensió i carcassa) i la física del moviment ressonant, podem apreciar per què els actuadors ressonants lineals s'han convertit en l'opció preferida per als enginyers que dissenyen experiències tàctils de nova generació. Tant si esteu escrivint un text, jugant a un joc o navegant per un dispositiu intel·ligent, la vibració suau i sensible que sentiu probablement està impulsada per l'elegant principi de funcionament d'un actuador ressonant lineal.
Consulteu els vostres experts líders
T'ajudem a evitar els entrebancs per oferir la qualitat i el valor que necessites per al teu micromotor sense escombretes, a temps i dins del pressupost.
Data de publicació: 16 de desembre de 2025



