

Tutvustage
Mikrovibratsioonimootoridmängivad olulist rolli mitmesugustes rakendustes alates tarbeelektroonikast kuni meditsiiniseadmeteni. Need võimaldavad haptilist tagasisidet, häireteateid ja vibratsioonipõhiseid hoiatusi, et parandada kasutuskogemust. Turul olevate erinevat tüüpi mikrovibratsioonimootorite hulgas on kaks kõige levinumat variantiERM (ekstsentrilise pöörleva massiga) vibratsioonimootoridja LRA (lineaarse resonantsajamiga) vibratsioonimootorid. Selle artikli eesmärk on selgitada ERM-i ja LRA-vibratsioonimootorite erinevusi, tutvustades nende mehaanilist struktuuri, jõudlust ja rakendusi.
Lisateavet ERM vibratsioonimootorite kohta
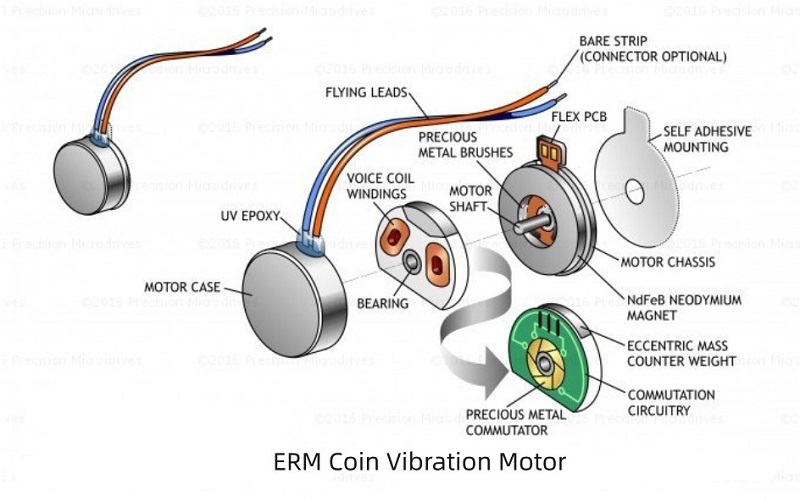
ERM vibratsioonimootoridon oma lihtsuse, kulutõhususe ja laia ühilduvuse tõttu laialdaselt kasutusel. Need mootorid koosnevad ekstsentrilisest massist, mis pöörleb mootori võllil. Kui mass pöörleb, tekitab see tasakaalustamata jõu, mis põhjustab vibratsiooni. Vibratsiooni amplituudi ja sagedust saab reguleerida pöörlemiskiiruse juhtimisega. ERM-mootorid on loodud tekitama vibratsioone laias sagedusvahemikus, mistõttu sobivad need nii õrnade kui ka intensiivsete märguannete jaoks.
Lisateave LRA vibratsioonimootorite kohta
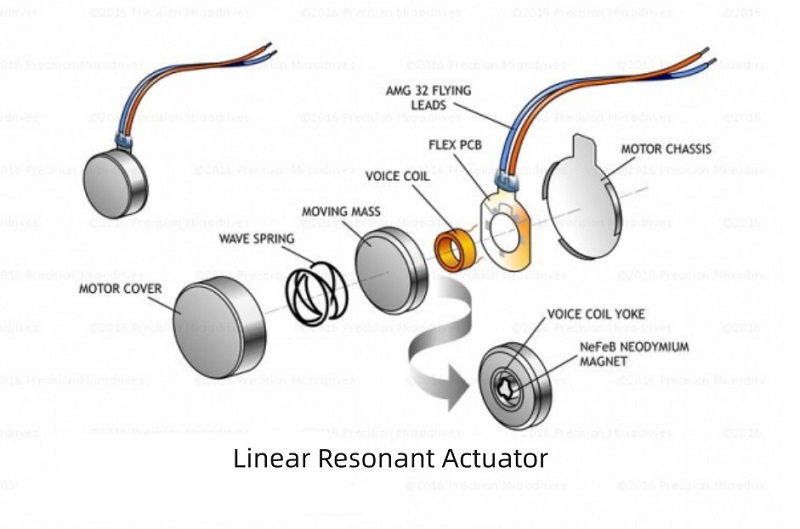
LRA vibratsioonimootoridTeisest küljest kasutavad need vibratsiooni tekitamiseks teistsugust mehhanismi. Need koosnevad vedruga ühendatud massist, moodustades resonantssüsteemi. Elektrisignaali rakendamisel paneb mootori mähis massi vedru sees edasi-tagasi võnkuma. See võnkumine tekitab vibratsiooni mootori resonantssagedusel. Erinevalt ERM-mootoritest on LRA-del lineaarne liikumine, mille tulemuseks on madal energiatarve ja kõrge energiatõhusus.
Võrdlev analüüs
1. Tõhusus ja täpsus:
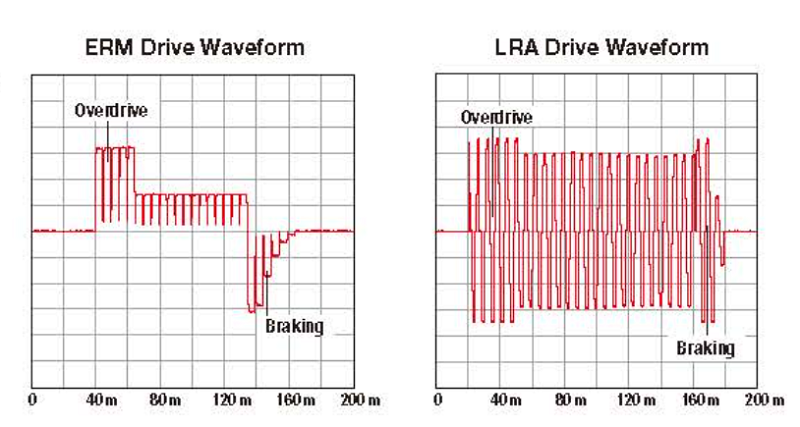
ERM-mootorid tarbivad oma pöörlemisliikumise tõttu tavaliselt rohkem energiat kui LRA-mootorid. LRA-d juhib lineaarne võnkumine, mis on tõhusam ja tarbib vähem energiat, pakkudes samal ajal täpseid vibratsioone.
2. Kontroll ja paindlikkus:
ERM-mootorid pakuvad oma pöörleva ekstsentrilise massi tõttu laiemat vibratsioonivahemikku. Neid on suhteliselt lihtne juhtida ning need võimaldavad sageduse ja amplituudi manipuleerimist.Kohandatud lineaarmootoromab lineaarset liikumist, mis pakub täpsemat juhtimist, kuid ainult teatud sagedusvahemikus.
3. Reaktsiooniaeg ja vastupidavus:
ERM-mootoritel on kiirem reageerimisaeg, kuna need tekitavad vibratsiooni kohe pärast aktiveerimist. Pöörleva mehhanismi tõttu on need aga pikaajalisel kasutamisel altid kulumisele. LRA-l on võnkemehhanism, mis kestab kauem ja on vastupidavam rakenduste jaoks, mis nõuavad pikaajalist kasutamist.
4. Müra ja vibratsiooni omadused:
ERM-mootorid kipuvad tekitama rohkem müra ja edastama vibratsiooni ümbritsevasse keskkonda. Seevastu LRA tekitab sujuvamaid vibratsioone minimaalse müraga, mistõttu sobib see rakenduste jaoks, mis vajavad diskreetset taktiilset tagasisidet.
Rakendusvaldkonnad
ERMväikesed vibreerivad mootoridleidub tavaliselt mobiiltelefonides, kantavates seadmetes ja mängukontrollerites, mis vajavad laia vibratsioonivahemikku. LRA-sid seevastu kasutatakse sageli meditsiiniseadmetes, puutetundlikes ekraanides ja kantavates seadmetes, mis vajavad täpseid ja peeneid vibratsioone.
Kokkuvõtteks
Kokkuvõttes valikERM ja LRA vibratsioonimootoridsõltub konkreetse rakenduse nõuetest. ERM-mootorid pakuvad laiemat vibratsioonivahemikku energiatarbimise arvelt, samas kui LRA-mootorid pakuvad täpsemat vibratsiooni ja suuremat energiatõhusust. Nende erinevuste mõistmine aitab disaineritel, inseneridel ja arendajatel teha teadlikke otsuseid mikrovibratsioonimootorite valimisel oma vastavate rakenduste jaoks. Lõppkokkuvõttes peaks ERM- ja LRA-mootorite vaheline valik põhinema sellistel teguritel nagu energiatõhusus, juhtimise paindlikkus, nõutav täpsus, vastupidavus ja müratase.
Konsulteerige oma juhiekspertidega
Aitame teil vältida lõkse, et pakkuda kvaliteeti ja väärtust teie mikroharjadeta mootorivajadusele, õigeaegselt ja eelarve piires.
Postituse aeg: 24. november 2023



