تولید کننده موتور میکرو براشلس
A موتور میکرو بدون جاروبکیک استموتور الکتریکی کوچککه از فناوری بدون جاروبک برای نیروی محرکه استفاده میکند. این موتور شامل یک استاتور و یک روتور با آهنرباهای دائمی متصل به آن است. عدم وجود جاروبک، اصطکاک را از بین میبرد و در نتیجه راندمان بیشتر، طول عمر بیشتر و عملکرد بیصداتر را به همراه دارد.یک موتور میکرو براشلس معمولاً قطری کمتر از 6 میلیمتر دارد، که آن را به انتخابی عالی برای دستگاههای کوچک تبدیل میکند: به خصوص رباتها، دستگاههای پوشیدنی و سایر کاربردهای میکرومکانیکی که در آنها اندازه جمعوجور و عملکرد بالا بسیار مهم است.
به عنوان یک حرفه ایتولید کننده موتور میکرو براشلسو تامین کننده در چین، ما میتوانیم نیازهای مشتریان را با موتور بدون جاروبک با کیفیت بالا و سفارشی برآورده کنیم. در صورت تمایل، با ما تماس بگیرید.لیدر میکرو.
آنچه ما تولید میکنیم
موتورهای میکرو بدون جاروبک میتوانند به سرعتهای بسیار بالا دست یابند و کنترل دقیقی ارائه دهند، اما در مقایسه با موتورهای جاروبکدار پیچیدهتر و گرانتر هستند. با این وجود، عملکرد و قابلیت اطمینان برتر آنها، آنها را به انتخابی ترجیحی برای بسیاری از کاربردهایی که نیاز به جمعوجور بودن و کارایی دارند، تبدیل کرده است.
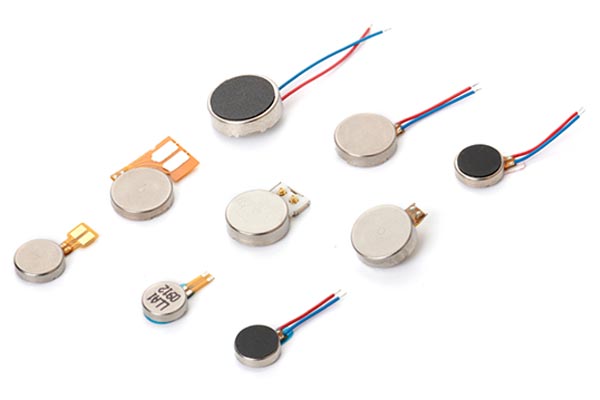
شرکت ما در حال حاضر ارائه میدهدچهار مدل موتور بدون جاروبک با قطرهای بین ۶ تا ۱۲ میلیمترما گزینههای قطری مختلفی را برای برآورده کردن نیازهای سرعت بالا در کاربردهای مختلف در دسترس داریم. ما دائماً در حال بهبود طراحی موتورهای بدون جاروبک خود هستیم تا از روندهای صنعت جلوتر باشیم و نیازهای در حال تحول مشتریان خود را برآورده کنیم.
به دنبال حرکت دقیق و روان هستید؟ کشف کنید که چگونه ماموتورهای خطیعملکرد بینظیری را برای برنامههای پیشرفته ارائه میدهد!
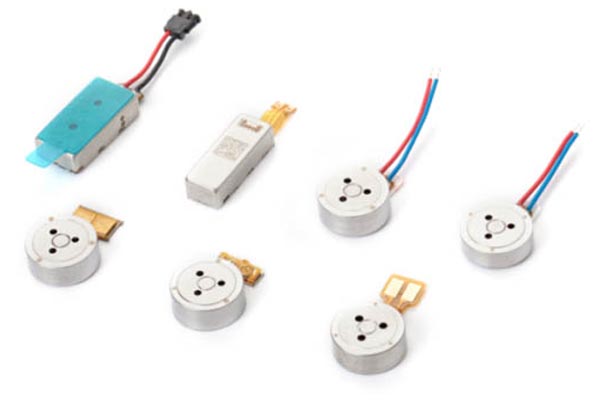
نوع FPCB
موتورهای ویبره BLDC از نوع FPCB (برد مدار چاپی انعطافپذیر) مدارهای انعطافپذیر را برای تحریک فشرده و با کارایی بالا ادغام میکنند.
ساختار:طراحی مدار انعطافپذیر، امکان جا دادن فضاهای تنگ را فراهم میکند (پوشیدنیها, لوازم الکترونیکی کوچک).
عملکرد:عملکرد بدون جاروبک، لرزش روان، کارایی و طول عمر طولانی را تضمین میکند.


نوع سیم سربی
ارتعاش BLDC از نوع سیم رابطموتورهااستفاده کردنسیمهای رابط برای اتصال الکتریکی، که قابلیت تطبیقپذیری در کاربردهای مختلف را ارائه میدهند.
ساختار: طراحی سیم رابط، امکان ادغام آسان و انعطافپذیری سیمکشی را فراهم میکند و برای دستگاههایی که به چیدمان مکانی و سازگاری اتصال نیاز دارند، مناسب است.
عملکرد: با بهرهگیری از فناوری BLDC، این دستگاهها ارتعاشی روان و کارآمد را با دوام طولانی و عاری از سایش ناشی از برس ارائه میدهند.
ویژگیهای عمومی:در اندازههای مختلف برای مطابقت با نیازهای متنوع موجود است و بازخورد لمسی قابل اعتمادی را برای لوازم الکترونیکی مصرفی، تجهیزات صنعتی و موارد دیگر ارائه میدهد.





| مدلها | اندازه (میلیمتر) | ولتاژ نامی (ولت) | جریان نامی (میلی آمپر) | دارای رتبه (دور در دقیقه) | ولتاژ (ولت) |
| LBM0525 | φ5 * 2.5 میلیمتر | ۳.۰ ولت جریان مستقیم | حداکثر ۹۰ میلیآمپر | ۱۲۰۰۰ دقیقه | جریان مستقیم ۲.۷ تا ۳.۳ ولت |
| LBM0620 | φ6 * 2.0 میلیمتر | ۳.۰ ولت جریان مستقیم | حداکثر ۸۰ میلیآمپر | ۱۲۰۰۰ دقیقه | جریان مستقیم ۲.۷ تا ۳.۳ ولت |
| LBM0625 | φ6 * 2.5 میلیمتر | ۳.۰ ولت جریان مستقیم | حداکثر ۸۰ میلیآمپر | ۱۶۰۰۰±۳۰۰۰ | جریان مستقیم ۲.۷ تا ۳.۳ ولت |
| LBM0825 | φ8 * 2.5 میلیمتر | ۳.۰ ولت جریان مستقیم | حداکثر ۸۰ میلیآمپر | ۱۳۰۰۰±۳۰۰۰ | جریان مستقیم ۲.۷ تا ۳.۳ ولت |
| LBM1234 | φ12 * 3.4 میلیمتر | ۳.۷ ولت جریان مستقیم | حداکثر ۱۰۰ میلیآمپر | ۱۲۰۰۰±۳۰۰۰ | جریان مستقیم 3.0-3.7 ولت |
یکی از نمونههای ما را دوست دارید؟ درخواست دهید و مرحله آزمایش خود را همین امروز شروع کنید.
چرا میکرو موتورهای DC بدون جاروبک LEADER را انتخاب کنیم؟
موتورهای جریان مستقیم میکرو بدون جاروبک LEADER با ویژگیهای زیر متمایز میشوند:
موتورهای ما(مثلاً، اندازههای φ5-12 میلیمتر) طوری مهندسی شدهاند که در تنگترین فضاها جا شوند - ایدهآل برای پوشیدنیها، ایمپلنتهای پزشکی یا قطعات الکترونیکی فوقالعاده نازک.
ما طرحهای سفارشی (نوع FPCB، نوع سیم رابط و غیره) و پروفایلهای ارتعاشی را برای برآورده کردن نیازهای خاص صنعت (مثلاً، لمس ملایم برای ساعتهای هوشمند، ارتعاش قوی برای هشدارهای صنعتی) ارائه میدهیم.
موتورهای ما که با مواد درجه یک (آهنرباهای کمیاب، بردهای مدار چاپی دقیق) و آزمایشهای دقیق ساخته شدهاند، عملکرد پایدار را در محیطهای سخت (نوسانات دما، رطوبت) تضمین میکنند.
ما سیستمهای پیشرفتهی کموتاسیون و کنترل را ادغام میکنیم که امکان عملکرد طولانیمدت و کممصرف را فراهم میکند - که پشتوانهی آن سالها تخصص در مهندسی میکروموتور است.
با کنترل کل فرآیند تولید از تحقیق و توسعه تا تولید داخلی، میتوانیم هزینهها را بهتر مدیریت کنیم و تحویل به موقع را تضمین کنیم و به شما در جلوگیری از تأخیرها و افزایش بیش از حد بودجه کمک کنیم.
ما میتوانیم الزامات ویژه برای ولتاژ، طول سیم و رابطها را برآورده کنیم و به محصولات شما اجازه دهیم تا کاملاً متناسب با سناریوهای کاربردی منحصر به فرد باشند.
رعایت استانداردهای بینالمللی مانند ISO و RoHS توسط ما، ایمنی و پایبندی به مقررات را تضمین میکند و محصولات شما را بدون نگرانی در مورد انطباق با استانداردها، برای بازارهای جهانی مناسب میسازد.
مهندسان حرفهای ما با ارائه راهنماییهای لازم در انتخاب، به شما کمک میکنند تا موتور مناسب را به سرعت انتخاب کنید و چرخه توسعه محصول خود را کوتاه کنید.




نقاط درد مشتری و راهکارهای ما
ما درک میکنیم که مشتریان هنگام استفاده از موتورهای ویبره با چالشهای اساسی متعددی روبرو میشوند و ما با تکیه بر نقاط قوت فناوری و زنجیره تأمین خود، راهحلهای هدفمندی را برای رسیدگی به هر یک از آنها توسعه دادهایم.
موتورهای ویبره سنتی اغلب عمر کوتاهی دارند و تعویض مکرر آنها میتواند به طور جدی بر پایداری محصولات شما تأثیر بگذارد.
راه حل ما:موتورهای ویبره بدون جاروبک ما با بهرهگیری از ساختار بدون جاروبک، طول عمری بیش از ۵۰۰۰۰۰ چرخه (با حالت عملکرد ۱ ثانیه روشن و ۱ ثانیه خاموش) دارند. علاوه بر این، ما مجموعهای کامل از گزارشهای آزمایش طول عمر را ارائه میدهیم تا اطمینان حاصل کنیم که میتوانید به قابلیت اطمینان بلندمدت موتورهای ما اعتماد کنید.
مصرف بیش از حد برق موتورهای ویبره میتواند به طور قابل توجهی بر عمر باتری دستگاهها تأثیر بگذارد، که این موضوع نگرانی عمدهای برای بسیاری از کاربردها است.
راه حل ما:موتورهای ویبره بدون جاروبک ما با طراحی کممصرف، 20 تا 30 درصد کارآمدتر از موتورهای جاروبکدار هستند. این بهبود بهرهوری به افزایش عمر باتری محصولات شما کمک میکند و تجربه کاربری را بهبود میبخشد.
زمانهای تحویل غیرقابل پیشبینی و خطر اختلال در زنجیره تأمین میتواند باعث تأخیر و عدم قطعیت در برنامههای تولیدی شما شود.
راه حل ما:ما کارخانه خودمان را داریم که به ما امکان میدهد ظرفیت تولید انبوه را تضمین کنیم. علاوه بر این، میتوانیم به سرعت تولید آزمایشی در مقیاس کوچک را انجام دهیم و از تأمین پایدار و تحویل به موقع برای رفع نیازهای تولیدی شما اطمینان حاصل کنیم.

میکرو موتورهای بدون جاروبک LEADER چگونه طراحی میشوند؟
موتورهای میکرو براشلس LEADER (مانند سری موتورهای ویبره آنها) با تمرکز بر کوچکسازی، عملکرد و قابلیت اطمینان خاص برای کاربرد خاص مهندسی شدهاند:
LEADER هندسه استاتور-روتور را بهینه میکند تا در ابعاد بسیار کوچک (مثلاً با قطر ۵ میلیمتر) جا شود. موادی مانند آهنرباهای خاکی کمیاب با درجه بالا و سیمپیچهای مسی مهندسیشده دقیق، گشتاور قوی را با وجود اندازه کوچک تضمین میکنند.
برای مدلهای خاص ارتعاش، LEADER منطق کنترل BLDC کارآمد را در طراحی موتور ادغام میکند و امکان کنترل دقیق فرکانس و شدت ارتعاش را فراهم میکند. این امر برای بازخورد لمسی در دستگاههای پوشیدنی یا پزشکی بسیار مهم است.
با بهرهگیری از فناوری بدون جاروبک، این موتورها اصطکاک و سایش را به حداقل میرسانند. LEADER همچنین فرآیندهای تولید را اصلاح میکند تا از ثبات اطمینان حاصل شود - که برای استقرار انبوه در لوازم الکترونیکی مصرفی یا دستگاههای صنعتی اینترنت اشیا بسیار مهم است.
چه برای پیکربندیهای نوع FPCB (مدار انعطافپذیر) و چه از نوع سیم سربی، LEADER طرحهای موتور را متناسب با نیازهای مکانی و عملکردی صنایع خاص (به عنوان مثال، پروفیلهای بسیار نازک برای ساعتهای هوشمند، ساختارهای مستحکم برای ابزارهای پزشکی) تنظیم میکند.
به عنوان یک تولیدکننده مستقیم، ما تحویل سریع نمونه را ارائه میدهیم
ویژگی کلیدی موتور کوچک بدون جاروبک:
موتورهای ما طوری مهندسی شدهاند که عملکرد دقیق و پایداری را تضمین کنند و تضمین کنند که برنامه شما هر بار به طور روان اجرا میشود.
موتورهای DC پیشرفته بدون جاروبک ما برای مصرف بهینه برق طراحی شدهاند و به شما این امکان را میدهند که از بهرهوری انرژی برتر و هزینههای عملیاتی پایینتر بهرهمند شوید.
موتورهای ما در آزمون زمان سربلند بیرون آمدهاند و هیچ جاروبکی برای فرسودگی ندارند، که این امر نیازهای تعمیر و نگهداری را به حداقل میرساند و عمر مفید را افزایش میدهد.
از عملکرد فوقالعاده بیصدای موتور لذت ببرید، ایدهآل برای محیطهای حساس به صدا، که فضایی آرام را بدون افت عملکرد فراهم میکند.
از رباتیک گرفته تا راهکارهای انرژی تجدیدپذیر، موتورهای ما عملکرد خود را در کاربردهای متنوع ثابت کردهاند و تطبیقپذیری بینظیری را نشان میدهند.
موتورهای DC بدون جاروبک ما با حذف اصطکاک ناشی از جاروبکها در موتورهای سنتی، به سطوح بالاتری از راندمان دست مییابند که منجر به تولید گرمای کمتر و عمر طولانیتر موتور میشود.
موتورهای ما کوچکتر و سبکتر هستند و این آنها را برای کاربردهایی که محدودیت فضا و وزن از ملاحظات مهم هستند، ایدهآل میکند و حداکثر عملکرد را در فضای محدود ارائه میدهد.
کاربرد
موتورهای کوچک بدون جاروبک معمولاً کوچکتر و کارآمدتر از موتورهای جاروبکدار هستند. BLDCموتور ویبره سکهایبه دلیل وجود آیسی درایور، کمی گرانتر است. هنگام تغذیه این موتورها، توجه دقیق به قطبیت (+ و -) بسیار مهم است. علاوه بر این، آنها به دلیل طول عمر بیشتر، تولید صدای کمتر و قابلیت استفاده در طیف وسیعتری از کاربردها شناخته شدهاند. از جمله:
موتورهای ویبره BLDC معمولاً در صندلیهای ماساژ برای ارائه تکنیکهای مختلف ماساژ و تسکین تنش عضلانی استفاده میشوند. این موتورها ارتعاشاتی با شدت و فرکانسهای مختلف تولید میکنند تا گردش خون را تحریک کرده و بدن را آرام کنند. همچنین در سایر محصولات مراقبت شخصی مانند ماساژورهای دستی، حمامهای پا و ماساژورهای صورت نیز استفاده میشوند.
موتورهای ویبره BLDC در دستههای بازی ادغام شدهاند تا بازخورد لمسی ارائه دهند و با ایجاد حس لامسه، تجربه بازی را بهبود بخشند. آنها با ایجاد ارتعاش و بازخورد، رویدادهای مختلف درون بازی مانند برخورد، انفجار یا لگد سلاح را شبیهسازی میکنند.
موتورهای ویبره BLDC معمولاً در آلارمهای ویبرهدار و پیجرها برای ارائه اعلانهای نامحسوس و مؤثر برای افراد دارای اختلالات شنوایی استفاده میشوند. این موتور ارتعاشاتی ایجاد میکند که کاربران میتوانند آنها را حس کنند و آنها را از تماسهای دریافتی، پیامها یا هشدارها آگاه میکند. آنها همچنین در مچبندها و آژیرهای ویبرهدار برای کسانی که در شنیدن آلارمهای صوتی یا آژیرها مشکل دارند، استفاده میشوند.
موتورهای میکرو براشلس به دلیل اندازه کوچک، راندمان بالا و کنترل دقیق، اغلب در دستگاههای پزشکی به کار میروند. متههای دندانپزشکی، ابزارهای جراحی و دستگاههای پروتز از جمله دستگاههای پزشکی هستند که از این موتورها بهره میبرند. استفاده از موتورهای میکرو براشلس 3 ولتی در پزشکی میتواند نتایج بهتری برای بیماران، از جمله روشهای سریعتر، حرکات روانتر و کنترل بهتر، ایجاد کند. این موتورها با افزایش دقت و کارایی دستگاههای پزشکی، میتوانند به افزایش راحتی بیمار و نتایج کلی کمک کنند.
موتورهای میکرو براشلس معمولاً در ساعتهای هوشمند برای کنترل عملکرد لرزش استفاده میشوند. آنها بازخورد لمسی دقیق و قابل اعتمادی ارائه میدهند و کاربران را از اعلانها، تماسها یا آلارمهای دریافتی مطلع میکنند. این موتورهای میکرو کوچک، سبک وزن هستند و انرژی بسیار کمی مصرف میکنند و آنها را برای استفاده در فناوری پوشیدنی ایدهآل میکنند.
موتورهای میکرو براشلس اغلب در دستگاههای زیبایی مانند ماساژور صورت، دستگاههای رفع موهای زائد و ریشتراشهای برقی استفاده میشوند. این دستگاهها برای انجام وظایف مورد نظر خود به لرزش موتور متکی هستند. اندازه جمع و جور و صدای کم میکروموتور، آنها را برای دستگاههای زیبایی دستی ایدهآل میکند.
موتورهای میکرو بدون جاروبک به طور گسترده در رباتهای کوچک، پهپادها و سایر سیستمهای میکرومکانیکی استفاده میشوند. این موتورها کنترل دقیق و پرسرعتی را فراهم میکنند که برای عملکرد کارآمد این دستگاهها ضروری است. آنها در کاربردهای مختلف ربات مانند نیروی محرکه، فرمان و حرکت استفاده میشوند.
به طور خلاصه، موتورهای میکرو بدون جاروبک کنترل دقیق، سر و صدای کم و راندمان بالایی ارائه میدهند. آنها اغلب به دلیل مزایای فراوانشان نسبت به موتورهای جاروبکدار سنتی ترجیح داده میشوند.
چرا موتورهای ویبره بدون جاروبک از موتورهای جاروبکدار بهتر عمل میکنند؟
در مقایسه با موتورهای ویبره سنتی با جاروبک، مدلهای بدون جاروبک از نظر طول عمر، کارایی و پایداری ارتعاش برتری دارند - همه اینها ریشه در طراحی بدون جاروبک و عملکرد تحت کنترل درایور آنها دارد:
موتورهای براش در درجه اول به دلیل سایش مکانیکی ناشی از تماس جاروبک و کموتاتور از کار میافتند: با چرخش کموتاتور، جاروبکهای فلزی/کربنی به آن ساییده میشوند و به تدریج فرسوده میشوند. ذرات جاروبک فرسوده همچنین شکافهای بین بخشهای کموتاتور را مسدود میکنند و منجر به اتصال کوتاه میشوند. جاروبکها حتی ممکن است بشکنند و باعث خرابی مدار باز شوند. معمولاً موتورهای براش فقط ۱۰۰۰۰۰ چرخه (۱ ثانیه روشن، ۱ ثانیه خاموش) دوام میآورند.
موتورهای بدون جاروبک، جاروبکها و کموتاتورها را حذف میکنند و خطرات سایش مکانیکی را از بین میبرند. اجزای اصلی آنها (سیمپیچها، آهنرباها، آیسی درایور) با گذشت زمان حداقل تخریب را دارند و به آنها اجازه میدهند تا ۵۰۰۰۰۰ چرخه (۱ ثانیه روشن، ۱ ثانیه خاموش) کار کنند.
موتورهای براشلس به دو روش کلیدی انرژی را هدر میدهند:
مقاومت تماسی: اصطکاک بین جاروبکها و کموتاتور باعث ایجاد مقاومت الکتریکی میشود و بخشی از انرژی ورودی را به گرما تبدیل میکند (به جای نیروی چرخشی).
- تلفات قوس الکتریکی: وقتی جاروبکها بین بخشهای کموتاتور جابجا میشوند، قوسهای الکتریکی (تخلیههای الکتریکی پیوسته، برخلاف جرقههای کوتاه) تشکیل میشوند و انرژی اضافی مصرف میکنند.
موتورهای بدون جاروبک هیچ مقاومت تماسی یا قوس الکتریکی ندارند. انرژی الکتریکی مستقیماً در سیمپیچهای استاتور به انرژی مغناطیسی و سپس به نیروی چرخشی تبدیل میشود - که اتلاف انرژی را به حداقل میرساند. این راندمان، آنها را برای دستگاههای باتریدار یا کاربردهایی که صرفهجویی در مصرف انرژی حیاتی است، مناسب میکند.
موتورهای براش به دلیل جریان نامتعادل و سایش، ارتعاش ناپایداری ایجاد میکنند:
- جریان ناپایدار: نوسانات در فاصله کنتاکتهای جاروبک-کموتاتور (ناشی از سایش یا همترازی) باعث تغییر جریان میشود و در نتیجه سرعت نامنظم شفت و ارتعاش ناهموار را به دنبال دارد.
- انحراف ناشی از سایش: با سایش جاروبکها، سطح تماس آنها کاهش یافته و مقاومت افزایش مییابد، که این امر نوسانات جریان را بدتر کرده و دامنه/فرکانس ارتعاش را غیرقابل پیشبینی میکند.
موتورهای بدون جاروبک از آیسی درایور برای کنترل دقیق زمانبندی توان استاتور استفاده میکنند و جریان پایدار و مداوم را تضمین میکنند - شفت با سرعت یکنواخت میچرخد و جرم خارج از مرکز ارتعاش ثابتی ایجاد میکند. بدون سایش مکانیکی، عملکرد آنها در طول زمان ثابت میماند و حتی پس از هزاران ساعت استفاده، از رانش ارتعاش جلوگیری میشود.
موتورهای DC براشدار | موتورهای جریان مستقیم بدون جاروبک |
| عمر کوتاهتردهانه | طول عمر بیشتر |
| افزایش سر و صدای بلندتر | کاهش نویز آرامتر |
| قابلیت اطمینان پایینتر | قابلیت اطمینان بالاتر |
| هزینه کم | هزینه بالا |
| راندمان پایین | راندمان بالا |
| جرقه زدن کموتاتور | بدون جرقه |
| دور موتور پایین | دور در دقیقه بالا |
| رانندگی آسان | سخترانندگی کردن |
طول عمر موتور بدون جاروبک
طول عمر یک موتور جریان مستقیم میکرو بدون جاروبک در درجه اول به عوامل مختلفی مانند کیفیت ساخت، شرایط کارکرد و شیوههای نگهداری آن بستگی دارد. به طور کلی، موتورهای بدون جاروبک به دلیل طراحی کارآمدترشان که باعث کاهش فرسودگی مکانیکی میشود، طول عمر بیشتری نسبت به موتورهای جاروبکدار دارند. لازم به ذکر است که موتور باید ظرف شش ماه از تاریخ حمل و نقل به دستگاه ترمینال مونتاژ شود. اگرموتور ویبره کوچکاگر بیش از شش ماه استفاده نشده باشد، توصیه میشود قبل از استفاده، موتور را با برق (به مدت ۳ تا ۵ ثانیه روشن) روشن کنید تا بهترین اثر لرزش حاصل شود.
با این حال، عوامل متعددی میتوانند بر طول عمر یک موتور مینی براشلس تأثیر بگذارند. به عنوان مثال، اگر یک موتور فراتر از پارامترهای طراحی خود کار کند یا در معرض شرایط نامطلوب قرار گیرد، عملکرد آن به سرعت کاهش مییابد و طول عمر آن کاهش مییابد. به طور مشابه، شیوههای نادرست نگهداری میتواند باعث فرسودگی سریع موتور شود که منجر به افزایش زمان از کار افتادگی یا حتی خرابی موتور میشود.
اطمینان از عملکرد و نگهداری مناسب برای افزایش طول عمر موتور مینیاتوری بدون جاروبک ضروری است. شیوههای نصب مناسب، نگهداری منظم و تأمین کافی برق پاک میتواند به افزایش طول عمر موتور کمک کند. بازرسی منظم موتور کوچک بدون جاروبک، از جمله تعویض قطعات و تمیز کردن، میتواند به شناسایی مشکلات قبل از ایجاد آسیب قابل توجه کمک کند.
موتورهای میکرو بدون جاروبک را به صورت عمده و گام به گام تهیه کنید
سوالات متداول در مورد موتور میکرو براشلس
هنگام انتخاب یک موتور بدون جاروبک، پارامترهای حیاتی باید در نظر گرفته شوند. از جمله ولتاژ نامی، جریان نامی، سرعت نامی و مصرف برق. اندازه و وزن موتور نیز باید ارزیابی شود تا مطمئن شویم که با کاربرد مورد نظر مطابقت دارد.
موتورهای BLDC میکرو ۳ ولتی از بسیاری از انواع دیگر موتورهای بدون جاروبک کوچکتر و سبکتر هستند، که آنها را برای استفاده در کاربردهای کوچک ایدهآل میکند. با این حال، آنها عموماً از موتورهای بدون جاروبک بزرگتر قدرت کمتری دارند.
بله، اما آنها باید به طور مناسب از رطوبت و دمای شدید که میتواند باعث آسیب شود، محافظت شوند.
بله. درایور موتور برای کنترل سرعت، جهت چرخش و تحویل مقدار دقیق جریان مورد نیاز موتور ضروری است. بدون درایور موتور، موتور به درستی کار نمیکند، در حالی که عملکرد و طول عمر آن به خطر میافتد.
مرحله ۱: ولتاژ و جریان مورد نیاز موتور DC بدون جاروبک را تعیین کنید.
مرحله ۲:یک کنترلر موتور انتخاب کنید که با مشخصات موتور مطابقت داشته باشد.
مرحله ۳:موتور DC بدون جاروبک را طبق دستورالعمل سازنده به کنترلر موتور وصل کنید.
مرحله ۴: برق را به کنترلر موتور وصل کنید و مطمئن شوید که ولتاژ و جریان نامی با الزامات موتور و کنترلر مطابقت دارد.
مرحله ۵:تنظیمات کنترلر موتور، از جمله سرعت، جهت و محدودیتهای جریان مورد نظر برای موتور را پیکربندی کنید.
مرحله ۶:ایجاد ارتباط بین کنترلر موتور و سیستم کنترل یا رابطی که دستورات را به موتور ارسال میکند.
مرحله ۷:از یک سیستم کنترل یا رابط برای ارسال دستورات به کنترلر موتور، مانند شروع، توقف، تغییر سرعت یا جهت، استفاده کنید.
مرحله ۸:عملکرد موتور را زیر نظر داشته باشید و در صورت لزوم، تنظیمات کنترلر موتور را برای بهینهسازی عملکرد یا رفع هرگونه مشکل تنظیم کنید.
مرحله ۹:پس از اتمام، موتور را با خیال راحت از کنترلر موتور و منبع تغذیه جدا کنید.
موتورهای ویبره DC بدون جاروبک، که به عنوان ... نیز شناخته میشوندموتورهای BLDCموتورهای ویبره سکهای بدون جاروبک معمولاً از یک استاتور دایرهای و یک روتور دیسکی خارج از مرکز واقع در آن تشکیل شدهاند. روتور از آهنرباهای دائمی احاطه شده توسط سیمپیچهایی که به استاتور متصل شدهاند، تشکیل شده است. هنگامی که جریان الکتریکی به سیمپیچ اعمال میشود، یک میدان مغناطیسی ایجاد میکند که با آهنرباهای روی روتور تعامل دارد و باعث چرخش سریع آن میشود. این حرکت چرخشی ارتعاشاتی ایجاد میکند که به سطحی که در آن نصب شدهاند منتقل میشوند و یک اثر وزوز یا ارتعاش ایجاد میکنند.
یکی از مزایای موتورهای بدون جاروبک این است که آنها جاروبک کربنی ندارند، که مسئله سایش در طول زمان را از بین میبرد و آنها را بسیار قابل اعتماد و کارآمد میکند.
این موتورها عمر مفید بسیار طولانیتری نسبت به موتورهای سکهای سنتی دارند، اغلب حداقل 10 برابر بیشتر. در حالت تست که موتور در یک چرخه 0.5 ثانیه روشن و 0.5 ثانیه خاموش کار میکند، کل طول عمر میتواند به 1 میلیون بار برسد. شایان ذکر است که موتورهای بدون جاروبک با درایورهای یکپارچه نباید به صورت معکوس رانده شوند، در غیر این صورت ممکن است آیسی درایور آسیب ببیند. توصیه میشود سیمهای موتور را با اتصال ولتاژ مثبت به سیم سربی قرمز (+) و ولتاژ منفی به سیم سربی سیاه (-) متصل کنید.
یک موتور کوچک بدون جاروبک، یک موتور جریان مستقیم بدون جاروبک (BLDC) با اندازه جمع و جور است که برای کاربردهایی طراحی شده است که در آنها فضا، راندمان و دوام بسیار مهم هستند. برخلاف موتورهای جاروبکدار، این موتور جاروبکهای فیزیکی را حذف میکند و به کموتاسیون الکترونیکی متکی است. این موتورها به گونهای مهندسی شدهاند که کوچک باشند (اغلب با قطرهایی به کوچکی ۵ تا ۱۲ میلیمتر) و در عین حال عملکرد بالایی ارائه دهند، که آنها را برای دستگاههایی مانند پوشیدنیها، ابزارهای پزشکی و لوازم الکترونیکی جمع و جور ایدهآل میکند.
یک موتور BLDC کوچک از طریق کموتاسیون الکترونیکی (بدون جاروبک فیزیکی) کار میکند. در اینجا یک تجزیه و تحلیل ساده شده آمده است:
- از یک استاتور (با سیمپیچهای مسی) و یک روتور (با آهنرباهای دائمی) تشکیل شده است.
- یک کنترل کننده (درایور) سیگنال های الکتریکی را به سیم پیچ های استاتور ارسال می کند و یک میدان مغناطیسی دوار ایجاد می کند.
- این میدان مغناطیسی با آهنرباهای دائمی روتور در تعامل است و باعث چرخش روتور میشود.
- حسگرها (یا الگوریتمهای بدون حسگر) موقعیت روتور را تشخیص میدهند و به کنترلر اجازه میدهند جهت جریان را در سیمپیچهای استاتور تنظیم کند - و چرخش پیوسته و روان را تضمین کند.
این طراحی، سایش جاروبکها را از بین میبرد و در نتیجه طول عمر بیشتر، راندمان بالاتر و عملکرد بیصداتر در مقایسه با موتورهای جاروبکدار را به همراه دارد.
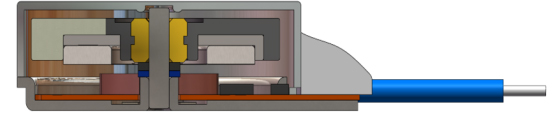
یک موتور ویبره میکرو بدون جاروبک دارای یک ساختار دایرهای مسطح و جمع و جور است که برای کاربردهای با فضای محدود بهینه شده است. این موتور شامل موارد زیر است:
استاتور: یک برد مدار چاپی مینیاتوری (PCB) با سیمپیچهای مسی یکپارچه که یک آرایه سیمپیچ الکترومغناطیسی را تشکیل میدهد.
- روتور: مجموعهای به شکل سکه با آهنرباهای دائمی (معمولاً آهنرباهای خاکی کمیاب برای چگالی گشتاور بالا) و یک جرم خارج از مرکز (برای ایجاد ارتعاش هنگام چرخش).
- سیستم کموتاسیون الکترونیکی: حسگرهای داخلی (یا الگوریتمهای کنترل بدون حسگر) و یک مدار درایور برای مدیریت جریان در سیمپیچهای استاتور، که جاروبکهای فیزیکی را حذف میکند.
سیمپیچهای استاتور به طور متوالی توسط سیستم کموتاسیون انرژی میگیرند و یک میدان مغناطیسی دوار ایجاد میکنند. این میدان با آهنرباهای دائمی روتور تعامل دارد و باعث چرخش روتور (با جرم خارج از مرکز آن) میشود. چرخش نامتعادل جرم خارج از مرکز باعث ایجاد لرزش میشود - مکانیسم اصلی برای بازخورد لمسی یا تحریک مکانیکی.
برای راهاندازی یک موتور ویبره بدون جاروبک DC، به یک درایور (کنترلر) موتور BLDC نیاز دارید که سه وظیفه کلیدی را انجام دهد:
۱. حسگر موقعیت روتور: درایور از حسگرهای اثر هال (یا الگوریتمهای بدون حسگر مانند تشخیص نیروی محرکه برگشتی) برای ردیابی موقعیت روتور استفاده میکند.
۲. کموتاسیون: بر اساس موقعیت روتور، درایور جهت جریان را در سیمپیچهای استاتور تغییر میدهد و یک میدان مغناطیسی دوار را حفظ میکند.
۳. کنترل سرعت/شدت: با تنظیم ولتاژ یا جریان اعمال شده به استاتور، درایور سرعت چرخش موتور را کنترل میکند و در نتیجه شدت ارتعاش را تنظیم میکند.
برای یکپارچهسازی، درایور به ترمینالهای برق و سیگنال موتور (مثلاً کانکتورهای FPCB یا سیمهای رابط) متصل میشود و کنترلکننده اصلی سیستم، دستوراتی (مثلاً سیگنالهای PWM) را برای تنظیم الگوها یا شدت ارتعاش به درایور ارسال میکند.