

این قطعات کوچک و جمع و جورموتورهای ویبره سکهایمعمولاً در تلفنهای هوشمند، ردیابهای تناسب اندام و سایر دستگاههای الکترونیکی قابل حمل یافت میشوند.
موتورهای ویبره سکهای یا پنکیکی ما به عنوان موتورهای جرم چرخان خارج از مرکز (ERM) طراحی شدهاند، بنابراین میتوانند با همان روشهای موتورهای پیجر کار کنند. آنها از همان اصل درایو موتور، از جمله استفاده از مدار پل H برای ترمز فعال، استفاده میکنند.
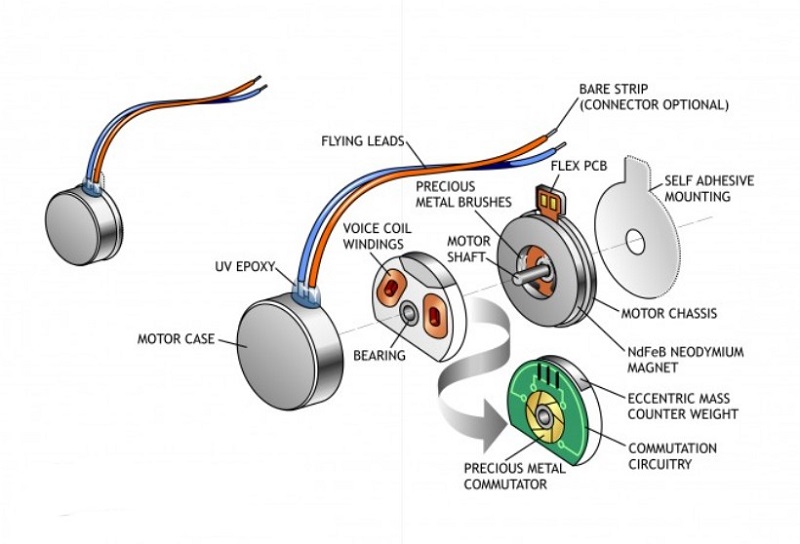
ساختار موتور ویبره سکهای برسدار شامل یک PCB مسطح است که روی آن یک مدار کموتاسیون ۳ قطبی در اطراف یک شفت داخلی مرکزی قرار گرفته است. روتور موتور ویبره از دو "سیمپیچ صوتی" و یک جرم کوچک که در یک دیسک پلاستیکی مسطح با یک یاتاقان در مرکز ادغام شده است، تشکیل شده است که روی شفت قرار دارد. دو برس در قسمت زیرین دیسک پلاستیکی با پدهای کموتاسیون PCB در تماس هستند و برق را به سیمپیچ صوتی تأمین میکنند و یک میدان مغناطیسی ایجاد میکنند. این میدان مغناطیسی با شار مغناطیسی تولید شده توسط یک آهنربای دیسکی متصل به شاسی موتور تعامل دارد.
مدار کموتاسیون، جهت میدان را از طریق سیمپیچهای صوتی تغییر میدهد و این با جفت قطبهای NS که در آهنربای نئودیمیوم تعبیه شدهاند، تعامل دارد. دیسک میچرخد و به دلیل جرم خارج از مرکز داخلی،موتورمیلرزد!
با کارشناسان رهبر خود مشورت کنید
ما به شما کمک میکنیم تا از مشکلات اجتناب کنید و کیفیت و ارزش مورد نیاز موتور میکرو براشلس خود را، به موقع و با بودجهی تعیینشده، ارائه دهید.
زمان ارسال: ۲۵ مه ۲۰۲۴



