Mea Hana Motika LRA (Linear Resonant Actuator)
ʻO ka hui Alakaʻi MicroHoʻokumu ka vibrator LRA i ka haʻalulua memanaʻo hoʻihoʻi hapticma ke kuhikuhi-Z a me ke kuhikuhi-X. Ua ʻike ʻia e ʻoi aku ka maikaʻi o nā ERM i ka manawa pane a me ke ola, e kūpono ana no ka ʻenehana handset a me ka haʻalulu hiki ke hoʻohana ʻia.
Hāʻawi ka motika haʻalulu LRA i nā haʻalulu alapine paʻa me ka hoʻopau ʻana i ka mana liʻiliʻi a me ka hoʻomaikaʻi ʻana i ka maikaʻi o nā ʻike haptic no nā mea hoʻohana. Hoʻokō ia i ka haʻalulu kū pololei ma o ka ikaika electromagnetic a me ke ʻano resonance, i hoʻoulu ʻia e nā haʻalulu i hana ʻia e ka nalu sine.
Ma ke ʻano he loealiʻiliʻilaina mea hana kaʻa a me ka mea hoʻolako ma Kina, hiki iā mākou ke hoʻokō i nā pono o nā mea kūʻai aku me ka motika linear kiʻekiʻe maʻamau. Inā makemake ʻoe, e ʻoluʻolu e hoʻokaʻaʻike iā Leader Micro.
Ka Mea a Mākou e Hana Ai
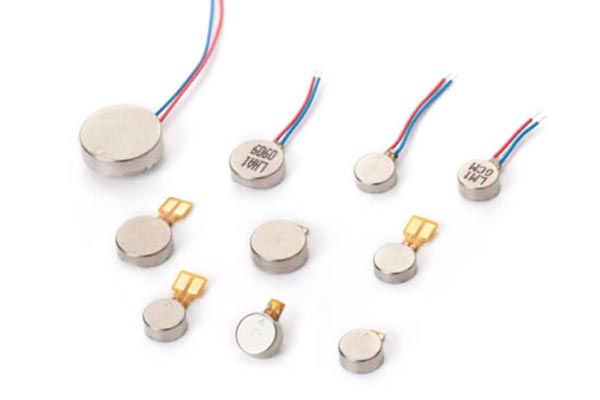
ʻO ka LRA (Mea Hoʻokō Resonant Linear) he motika haʻalulu i hoʻokele ʻia e AC me ke anawaena nui o8mm, kahi i hoʻohana pinepine ʻia i nā noi hoʻihoʻi haptic. Ke hoʻohālikelike ʻia me nā motika haʻalulu kuʻuna, ʻoi aku ka mālama pono o ka motika haʻalulu LRA. Hāʻawi ia i kahi pane pololei me ka manawa hoʻomaka/hoʻōki wikiwiki.
Ua hoʻolālā ʻia kā mākou Linear Resonant Actuator (LRA) ʻano kālā e oscillate ma ke axis Z, e kū pololei ana i ka ʻili o ka motika. He mea kūpono loa kēia haʻalulu axis Z kikoʻī i ka hoʻoili ʻana i ka haʻalulu i nā noi hiki ke hoʻokomo ʻia. I nā noi hilinaʻi kiʻekiʻe (Hi-Rel), hiki i ka motika LRA ke lilo i koho kūpono i nā motika haʻalulu brushless no ka mea ʻo ka pūnāwai wale nō ka ʻāpana kūloko i hiki ke komo a hāʻule.
Ua kūpaʻa kā mākou hui i ka hāʻawi ʻana i ka actuator resonant linear kiʻekiʻe me nā kikoʻī i hiki ke hoʻopilikino ʻia e mālama i nā pono like ʻole o kā mākou mea kūʻai aku. Makemake ʻoe i nā hopena māmā a me ka pono? E ʻike pehea kā mākounā motika ʻole corehāʻawi i ka wikiwiki a me ka pololei loa!
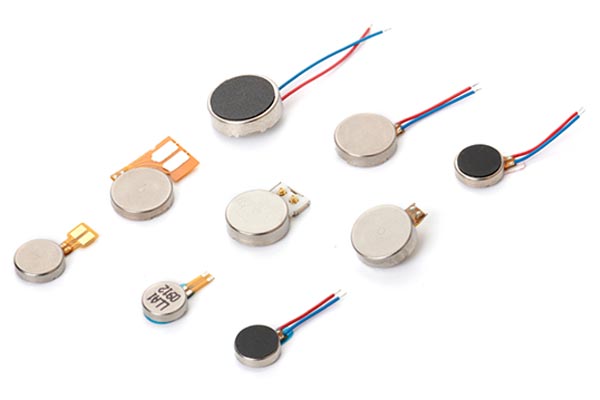
Nā Motika Haʻalulu LRA Z-axis: Nā Hoʻonā Tactile Liʻiliʻi, Versatile
ʻO kā mākouNā mīkini haʻalulu axis-Z(na LEADER) hāʻawi i ka manaʻo haptic pololei a pane koke i nā kapuaʻi wāwae ultra-compact—kūpono no nā polokalamu kahi i kaupalena ʻia ai ka wahi.
Loaʻa i nā hoʻonohonoho he nui (e laʻa,6mm × 2.5mm), kākoʻo kēia mau motika haʻalulu i ka hoʻohui maʻalahi (meFPCB a i ʻole nā pilina uea) e kūpono i nā hoʻolālā huahana like ʻole (nā mea hiki ke komo akamai, nā mīkini liʻiliʻi, nā mea uila lawe lima).
Hoʻohālikelike kēlā me kēia kumu hoʻohālike i ka miniaturization me ka hana haʻalulu hilinaʻi, e lilo ana lākou i koho pono no nā hāmeʻa liʻiliʻi a koi nui ʻia.







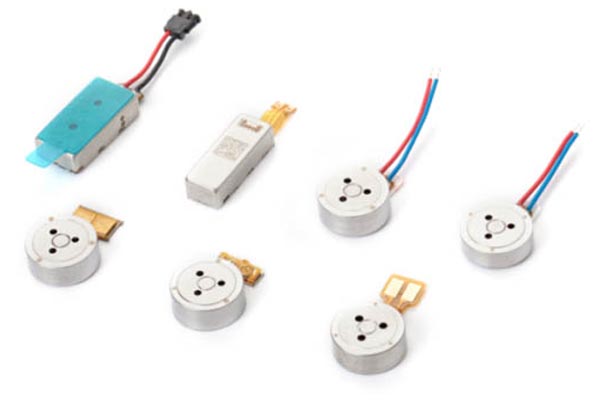
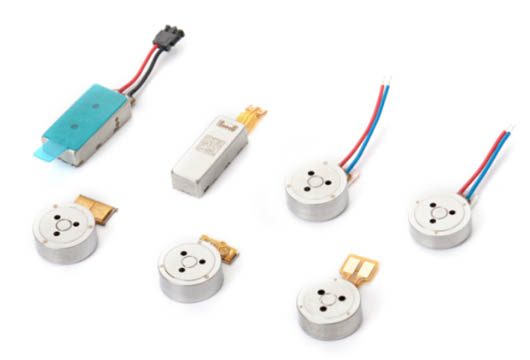
Nā Motika Haʻalulu X-axis: Nā Hoʻonā Haptic Slim, Hana Kiʻekiʻe
Hāʻawi nā mīkini haʻalulu X-axis a LEADERmanaʻo hoʻopā i kuhikuhi pono ʻia a kūlike i loko o kahi ʻano huinahā haʻahaʻa—kūpono no nā polokalamu e pono ai ka hoʻohui ʻana o nā ʻāpana pālahalaha a mālama pono i ka wahi.
Loaʻa ma8×9mm (LD0809AA)a meNā nui 8 × 15mm (LD0815AA), hoʻoulu kēia mau mīkini haʻalulu LRA i ka haʻalulu X-direction hilinaʻi, e kūpono ana iā lākou no nā huahana lahilahi e like menā kelepona akamai, nā papa, a me nā mea pono akamai lahilahi.
ʻO kā lākou hoʻolālā liʻiliʻi a maʻalahi hoʻi e hōʻoia i ka maʻalahi o ke kau ʻana me ka ʻole o ka hoʻopilikia ʻana i ka pane haptic.


| Nā kumu hoʻohālike | Ka nui (mm) | Ka Manawa i helu ʻia (V) | Ka Manawa i Hōʻike ʻia (mA) | Alapine (frequency) | Uila uila | Hoʻolalelale |
| LD0825 | φ8*2.5mm | 1.8VrmsACNalu sine | 85mA Max | 235±5Hz | 0.1~1.9 Vrms AC | 0.6Grms Min |
| LD0832 | φ8*3.2mm | 1.8VrmsACNalu sine | 80mA Max | 235±5Hz | 0.1~1.9 Vrms AC | 1.2Grms Min |
| LD4512 | 4.0Wx12L 3.5Hmm | 1.8VrmsACNalu sine | 100mA Max | 235±10Hz | 0.1~1.85 Vrms AC | 0.30Grms Min |
| LD2024 | Anawaena 20mmx24T | 1.2VmsAc Sine Wave | 200mA Max | 65±10Hz | 0.1~1.2VrmsAC | 2.5±0.5G |
ʻAʻole anei i loaʻa iā ʻoe ka mea āu e ʻimi nei? E kāhea aku i kā mākou poʻe kūkākūkā no nā huahana hou aku.
Noi
Loaʻa i nā actuators resonant linear kekahi mau pono kupaianaha: ke ola kiʻekiʻe loa, ka ikaika haʻalulu hiki ke hoʻololi ʻia, ka pane wikiwiki, ka walaʻau haʻahaʻa. Hoʻohana nui ʻia ia ma nā huahana uila e pono ai nā manaʻo haptic e like me nā kelepona akamai, nā mea hiki ke hoʻokomo ʻia, nā headset VR a me nā consoles pāʻani, e hoʻonui ana i nā ʻike o ka mea hoʻohana.
Nā kelepona akamai
Hoʻohana pinepine ʻia ka mīkini haʻalulu linear i nā kelepona akamai no ka manaʻo haptic, e like me ka hāʻawi ʻana i nā pane tactile no ke kikokiko ʻana a me ke kaomi ʻana i nā pihi. Hiki i nā mea hoʻohana ke manaʻo i ka manaʻo pololei ma o ko lākou mau manamana lima, kahi e hoʻomaikaʻi ai i ka pololei o ke kikokiko ʻana a hōʻemi i nā hewa kikokiko. Eia kekahi, hiki i ka mīkini haptic lra ke hāʻawi i nā leka hoʻomaopopo haʻalulu no nā leka hoʻomaopopo, nā kelepona a me nā alarm. Hiki iā ia ke hoʻomaikaʻi i ka launa pū ʻana o ka mea hoʻohana holoʻokoʻa.

Nā mea hiki ke komo
Loaʻa pū ka haʻalulu motika linear i nā mea hiki ke hoʻokomo ʻia, e like me nā uaki akamai, nā mea nānā kino a me nā mea lawe lima ʻē aʻe. Hiki i nā actuators resonant linear ke hāʻawi i nā leka hoʻomaopopo haʻalulu no nā kelepona e hiki mai ana, nā leka, nā leka uila a i ʻole nā alarm, e ʻae ana i nā mea hoʻohana e pili mau me ke ao me ka ʻole o ka hoʻopilikia ʻana i kā lākou hana o kēlā me kēia lā. Eia kekahi, hiki i ka motika micro linear ke hāʻawi i ka manaʻo haptic no ka nānā ʻana i ke kino, e like me ke nānā ʻana i nā ʻanuʻu, nā calorie a me ka helu o ka puʻuwai.

Nā Headset VR
Hiki ke loaʻa nā motika linear maʻamau i nā headset VR, e like me Oculus Rift a i ʻole HTC Vive, no ka hoʻokomo ʻana i nā sensory. Hiki i nā motika linear maʻamau ke hāʻawi i nā ʻano haʻalulu e hiki ke hoʻohālike i nā ʻano manaʻo like ʻole i loko o ka pāʻani, e like me ke pana ʻana, ke kuʻi ʻana a i ʻole ka pahū ʻana. Hoʻohui nā motika lra i kahi papa ʻē aʻe o ka realism i nā ʻike virtual reality.

Nā Pūʻulu Pāʻani
Hoʻohana ʻia hoʻi ka motika linear maʻamau i nā mea hoʻokele pāʻani no ka manaʻo haptic. Hiki i kēia mau motika ke hāʻawi i ka manaʻo haʻalulu no nā hanana koʻikoʻi i loko o ka pāʻani, e like me nā hahau holomua, nā ulia a i ʻole nā hana pāʻani ʻē aʻe. Hiki iā lākou ke hāʻawi i nā mea pāʻani i kahi ʻike pāʻani hohonu aʻe. Hiki i kēia mau haʻalulu ke hāʻawi i nā hōʻailona kino i nā mea pāʻani, e like me ka hoʻomaopopo ʻana iā lākou i ka wā e mākaukau ai kahi mea kaua e puhi a hoʻouka hou paha.

I ka hōʻuluʻulu manaʻo, ua pālahalaha ka hoʻohana ʻana i nā motika haʻalulu actuator linear, mai ke kelepona akamai a i nā consoles pāʻani, a hiki iā ia ke hoʻomaikaʻi nui i nā ʻike mea hoʻohana ma nā noi like ʻole.
Pehea e hoʻoulu ai nā mīkini LRA i ka haʻalulu
Hiki ke hana ʻia kā mākou mau motika LRA lahilahi a paʻa e ka hoʻolālā kūkulu ponoʻī a me nā ʻenehana i hoʻopaʻa ʻia - nā hana hou e hiki ai ke hoʻopuka haʻalulu ikaika i kahi ʻano liʻiliʻi loa.
Pehea e hoʻoulu ai nā mīkini LRA i ka haʻalulu
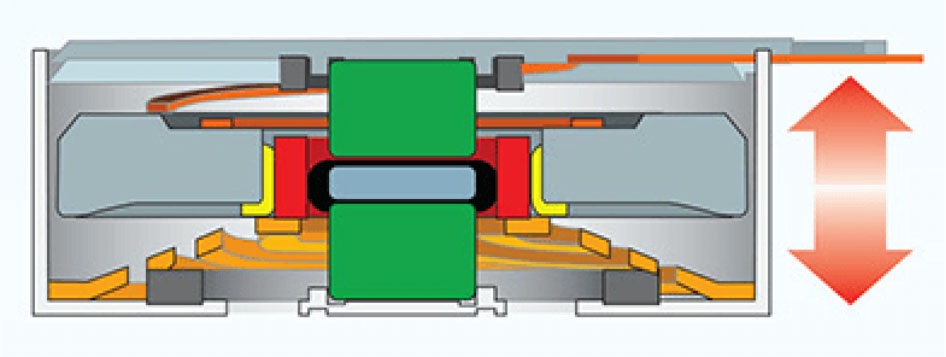
I loko o kahi LRA, noho paʻa ka ʻōwili leo ʻoiai e launa pū ana me kahi nui magnetic neʻe. Ke hoʻāla ʻia, hoʻokele ka ʻōwili i kēia nui e oscillate i luna a i lalo e kūʻē i nā pūnāwai o loko. Hoʻoneʻe kēia neʻe pinepine ʻana i ka ʻāpana LRA holoʻokoʻa, e hana ana i ka haʻalulu e like me ka mea e manaʻo ai ka poʻe hoʻohana.
Ua like kēia ʻano hana me ka ʻenehana mea hoʻolele leo: e like me nā mea hoʻolele leo (nāna e hoʻololi i nā hōʻailona AC i ka neʻe ʻana o ka ea e hana i ke kani), unuhi nā LRA i ke alapine (AC) a me ka amplitude i ka neʻe haʻalulu kino ma o kahi nui magnetic oscillating wikiwiki. Eia naʻe, ʻaʻole e like me nā mea hoʻolele leo (nāna e hana ma nā alapine ākea), ua hoʻonohonoho pono ʻia nā motika LRA no nā hui alapine kikoʻī - e kūpono ana iā lākou no nā noi manaʻo haptic i kuhikuhi ʻia.
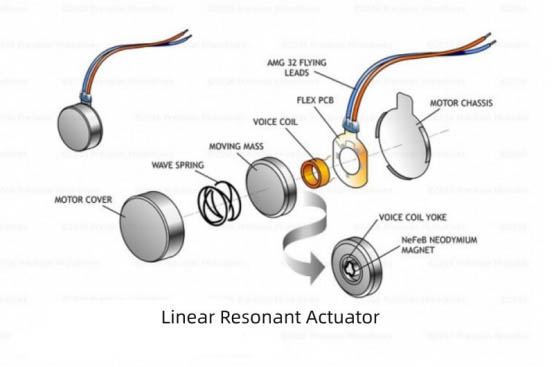
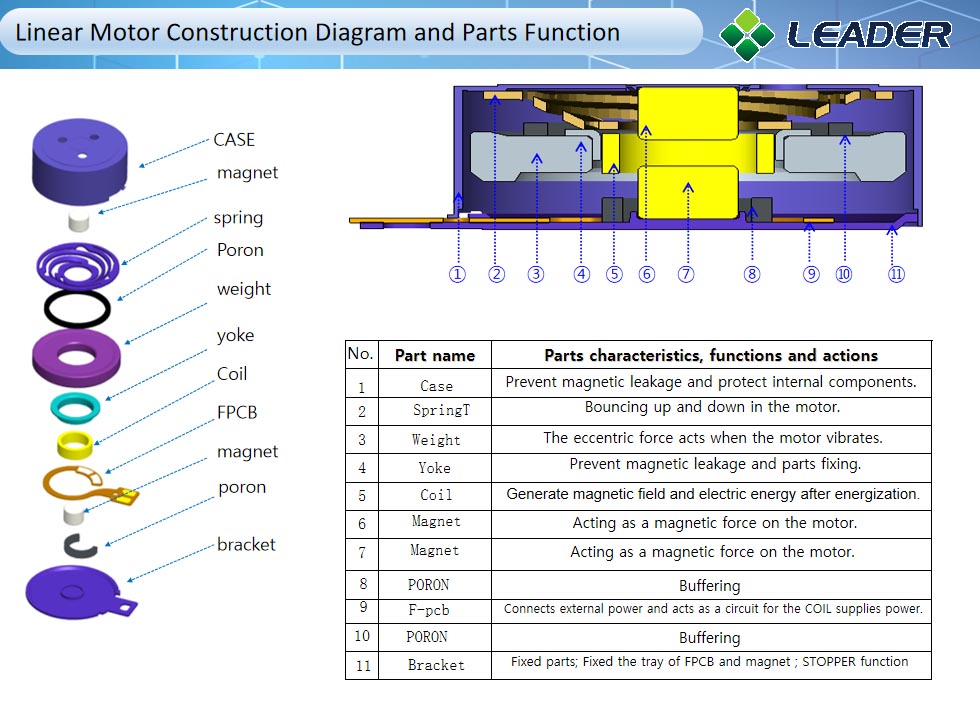
Nā ʻāpana Actuator Resonant Linear
Nā Motika Haʻalulu Linear: Pane wikiwiki, Mana Pololei a me ka Paleki Akamai
ʻOkoʻa nā motika haʻalulu laina (LRA) no ko lākou hoʻomaka wikiwiki loa—e hoʻomaka pinepine ana i loko o 5 a 10 milliseconds—he ʻokoʻa loa i ka pane lohi o nā motika eccentric rotating mass (ERM).
Hoʻokumu ʻia kēia hoʻāla wikiwiki ʻana mai ka neʻe koke ʻana o ke kikowaena magnetic: ke kahe ke au ma o ka ʻōwili leo o ka hāmeʻa, pane koke ka ʻāpana magnetic.
I ka hoʻohālikelike ʻana, pono nā mīkini ERM i ka manawa e hiki ai i ka wikiwiki hana ma mua o ka hoʻoulu ʻana i ka haʻalulu pololei; ʻoiai inā overdriven no ka wikiwiki wikiwiki, pono pinepine nā ERM i 20-50 milliseconds e paʻi i ka ikaika haʻalulu i makemake ʻia.
Nā ʻano a me nā hana o ka LRA Motor
Nā ʻano:
- Hana uila haʻahaʻa:He hana haʻahaʻa haʻahaʻa ko ka motika LRA me 1.8v, kūpono ia no nā mea uila liʻiliʻi e pono ai ka hoʻohana ikehu liʻiliʻi.
- Nui liʻiliʻi:ʻO ka liʻiliʻi o ka motika LRA e ʻae iā ia e hoʻohana ʻia i nā hāmeʻa me ka wahi palena.
- Manawa hoʻomaka/hoʻōki wikiwiki: He wikiwiki ka manawa hoʻomaka/hoʻōki o ka motika LRA, e ʻae ana iā ia e hāʻawi i ka manaʻo haptic pololei aʻe i ka mea hoʻohana.
- Hana walaʻau haʻahaʻa:Holo mālie kēia mau motika, he mea nui ia no nā mea hana e pono ai ka hana walaʻau liʻiliʻi.
- Nā hoʻonohonoho alapine a me ka amplitude i hiki ke hoʻopilikino ʻia:Hiki ke hoʻopilikino ʻia nā hoʻonohonoho alapine (frequency) a me ka amplitude o ka motika LRA e kūpono i nā koi kikoʻī o ka hāmeʻa.
Nā Hana:
- Hāʻawi ka motika LRA i ka manaʻo haptic pololei a me ka maikaʻi e hoʻonui i ka ʻike mea hoʻohana me ka hāmeʻa.
-ʻO ka manaʻo paʻi i hāʻawi ʻia e ka motika LRA e hoʻonui ai i ka ʻike o ka mea hoʻohana me ka hāmeʻa, e ʻoi aku ka leʻaleʻa o ka hoʻohana ʻana.
- Hoʻohana ka ʻenehana LRA i ka mana liʻiliʻi, e kūpono ai lākou no nā mea hana i hoʻolālā ʻia e mālama i ka ikehu.
- Hāʻawi nā motika LRA i kahi pane haʻalulu ʻoi aku ka kaohi a kūlike hoʻi ma mua o nā motika haʻalulu kuʻuna.
- Hiki ke hoʻololi ʻia nā hoʻonohonoho alapine (frequency) a me ka amplitude o ka motika LRA e hoʻokō i nā kikoʻī like ʻole o ka hāmeʻa.
ʻO nā mea nui e pili ana i ka hoʻolālā ʻana no nā LRA:
ʻEnekinia puna a me ka loiloi koʻikoʻi (e kaulike i ka maʻalahi a me ke kūpaʻa)
Hoʻonui i ke kahua electromagnetic (no ka hana ikaika kūpono)
Ka mana o ka ikaika haʻalulu (e hōʻoia i ka hana mau a me ke ola lōʻihi)
ʻO kahi mea e noʻonoʻo nui ʻia no nā LRA ʻo ko lākou manawa kū maoli: ma muli o ka ikehu kinetic i mālama ʻia i loko o nā pūnāwai kūloko i ka wā o ka hana, hiki iā lākou ke lawe a hiki i300 milisekonae hoʻomālielie iā lākou iho. Eia nō naʻe, hiki ke hoʻoholo ʻia kēia me ka braking hana: ma ka hoʻololi ʻana i ka pae o ka hōʻailona AC i hāʻawi ʻia i ka actuator e180 kekelē, ua hoʻokumu ʻia kahi ikaika kū'ē e pale aku i ka oscillation o ka pūnāwai—e hoʻōki ana i ka haʻalulu ma kahi kokoke10 milisekonano ka kaohi pololei, ma ke koi.
Mea Hoʻokō Hoʻohuihui Linear: Haʻalulu Kūpono ma o ka Resonance
ʻAʻole e like me nā hoʻolālā kuʻuna e hoʻouna pololei ana i ka ikaika o ka coil leo i ka ʻili, hoʻemi kā mākou linear resonant actuator (LRA) i ka hoʻohana ʻana i ka mana ma ka hoʻohana ʻana i ka alapine resonant o kāna ʻōnaehana pūnāwai kūloko. Ke hoʻokele ka coil leo i ka nui magnetic e oscillate ma ka alapine resonant kūlohelohe o ka pūnāwai, hoʻonui ka hāmeʻa i ka amplitude vibration me ka ʻoi aku ka maikaʻi—e hāʻawi ana i ka manaʻo tactile ikaika me ka ikehu liʻiliʻi.
Hoʻohana ʻia e kahi AC, hiki i kēia LRA iā ʻoe ke hoʻoponopono kūʻokoʻa i ka alapine haʻalulu a me ka amplitude e hoʻomaikaʻi i ka ʻike tactile. Hoʻokaʻawale kēia maʻalahi iā ia mai nā motika ERM, kahi i pili pono ai ke alapine a me ka amplitude (ʻo ka hoʻololi ʻana i kekahi e hoʻololi koke i kekahi).
Noi Mālama Ikehu o ke Ao Maoli: Nā Mea Hiki Ke Hoʻokomo Akamai
No nā uaki akamai i hoʻohana ʻia e ka pila (e hilinaʻi nei i nā ʻāpana liʻiliʻi a haʻahaʻa ka mana), hōʻemi ka hoʻolālā resonant o kā mākou LRA i ka huki mana e pili ana i ka haʻalulu ma30%+ hoʻohālikelike ʻia me nā ERM kuʻuna. No ka laʻana: hiki i kahi mea hahai kino e hoʻohana ana i kēia LRA ke mālama i ka manaʻo "notification buzz" maikaʻi ʻoiai e hoʻolōʻihi ana i ke ola pākaukau o kēlā me kēia lā ma o1.5 hola—he hoʻoikaika koʻikoʻi no nā hāmeʻa kahi e helu ai kēlā me kēia mAh.
I loko o nā mea hoʻokele touchscreen (hoʻohana ʻia i nā panela ʻoihana), ʻo ka mana alapine (frequency/amplitude) kūʻokoʻa o ka LRA e hōʻemi ana i ka hoʻonele ikehu pono ʻole: hāʻawi ia i ka manaʻo pololei "kaomi" a i ʻole "haptic texture" i ka wā e hoʻāla ʻia ai, ma kahi o ka holo ʻana ma kahi hoʻopuka paʻa (a pinepine ʻia) e like me ERM.
Nā Pōmaikaʻi Koʻikoʻi o nā Motika Haʻalulu LRA
Hoʻomaka ka pane wikiwiki loa5-10ms wale nō (ʻoi aku ka wikiwiki ma mua o nā motika ERM), e hiki ai i ka pane haptic koke a pololei no nā pilina pili manawa (e laʻa me nā piula wai paʻi, nā leka hoʻomaopopo).
Ka Pono o ka Ikehu Hoʻohana i ka resonance puna e hoʻonui i ka amplitude haʻalulu me ka liʻiliʻi o ka huki mana—e hōʻemi ana i ka hoʻohana ʻana i ka ikehu ma30%+ e kū'ē i. nā motika kuʻuna, e hoʻolōʻihi ana i ke ola pila no nā polokalamu lawe lima (nā mea hiki ke komo, nā kelepona akamai).
Mana Kūʻokoʻa o nā Palena ʻAe i ka hoʻoponopono kaʻawale o ka alapine haʻalulu a me ka amplitude,ke kākoʻo nei i nā ʻike paʻi i hiki ke hoʻopilikino ʻia (e laʻa, ka manaʻo "kaomi" vs. "buzz") ʻaʻole hiki i nā motika ERM ke hoʻohālikelike.
Hoʻolālā liʻiliʻi a haʻahaʻa hoʻi Nā ʻano hana lahilahi, mālama wahi (e.g., nā anawaena/mānoanoa liʻiliʻi) kūpono pono i loko o nā huahana liʻiliʻi (nā uaki akamai, nā pepeiao pepeiao) me ka ʻole o ka mōhai ʻana i ka hana.
Hiki i ka Braking Active Pololei ke ho'ōki i ka ha'alulu i loko o ~10ms(ma o180°ka hoʻololi ʻana o ka pae hōʻailona AC), e hoʻopau ana i ka resonance lōʻihi a me ka hōʻoia ʻana i ka ʻoki ʻana o ka manaʻo ma ke koi.
Nā Palapala Sila Nui e pili ana i ka Linear Resonance Actuator
Ua loaʻa i kā mākou hui kekahi mau palapala hoʻopaʻa palapala e pili ana i kā mākou ʻenehana motika LRA (Linear Resonant Actuator), kahi e hōʻike ana i kā mākou hana hou a me nā hana noiʻi alakaʻi ʻoihana. Uhi kēia mau palapala hoʻopaʻa palapala i nā ʻano like ʻole o ka ʻenehana actuator haʻalulu, me kāna hoʻolālā, ke kaʻina hana a me ka hoʻohana ʻana. Hiki i kā mākou ʻenehana i hoʻopaʻa ʻia ke hāʻawi iā mākou i nā motika LRA kiʻekiʻe, mālama pono i ka ikehu a hiki ke hoʻopilikino ʻia e mālama i nā pono kūikawā o kā mākou mea kūʻai aku.
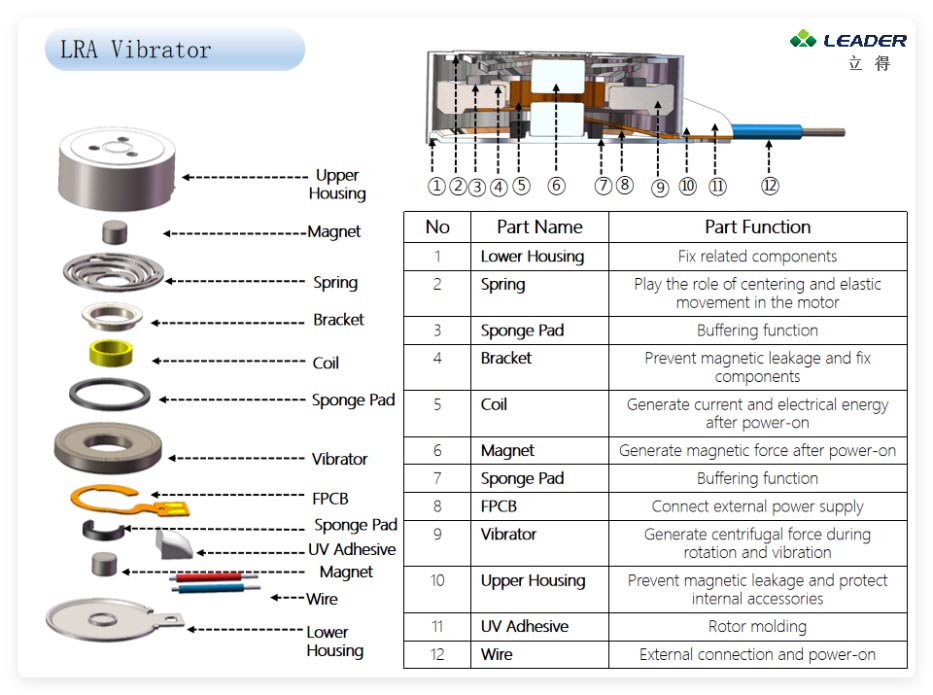
ʻO kekahi o nā palapala hoʻopaʻa e pili ana i ka hoʻolālā ʻana o ka mīkini haʻalulu linear me ka amplitude nui. Hoʻokomo ʻia kahi pad damping ma kēlā ʻaoʻao o ka ʻaoʻao hoʻopaʻa o ka hui stator a me ka hui rotor. Hiki i ka pad damping ke pale aku i ka hoʻokuʻi paʻakikī me ka hale i ka wā e haʻalulu ai ka hui rotor i loko o ka hale, kahi e hoʻolōʻihi ai i ke ola lawelawe o ka mīkini haʻalulu linear. Hoʻokomo ʻia kahi loop magnetic ma waho o ke coil e hoʻonui i ka amplitude o ka mīkini haʻalulu linear. Hiki iā ia ke hoʻomaikaʻi i ka ʻike haptic i ka wā e hoʻohana ai i nā mea uila i lako me nā mīkini haʻalulu linear.
Ma keʻano holoʻokoʻa, hoʻokaʻawale kā mākou ʻenehana motika LRA i hoʻopaʻa ʻia iā mākou mai nā mea pāʻani ʻoihana ʻē aʻe, e ʻae ana iā mākou e hāʻawi i nā huahana kiʻekiʻe, hou a me ka ikehu i kā mākou mea kūʻai aku. Ke kūpaʻa nei mākou i ka hoʻokele ʻana i ka hana hou ʻenehana, a me ka hāʻawi ʻana i nā hoʻonā holomua e hoʻomaikaʻi i ka ʻike mea hoʻohana i nā polokalamu uila.
E kiʻi i nā Micro LRA Motors ma ka nui Hana-i-ka-ʻanuʻu
Nā nīnau i nīnau pinepine ʻia no ka motika Linear Haptic
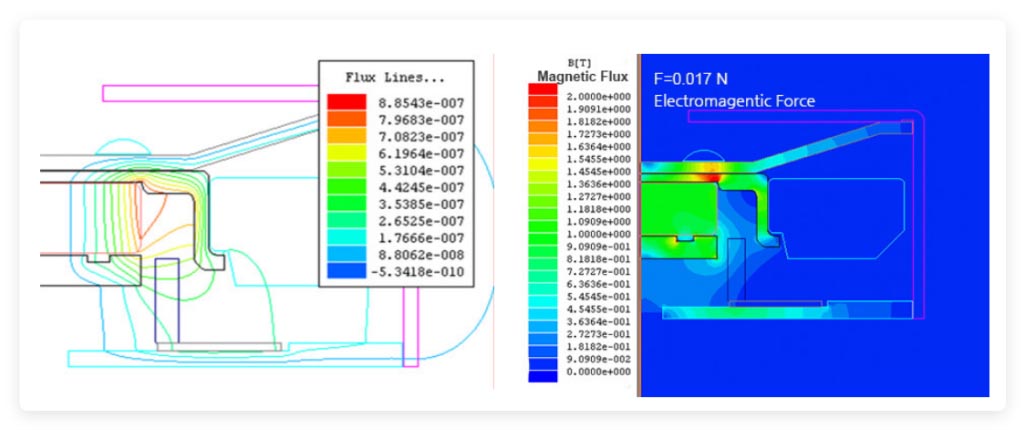
I ka hoʻohālikelike ʻana menā mīkini haʻalulu, kahi e hoʻohana pinepine ai i ka hoʻololi electromechanical,Nā mīkini haʻalulu LRA (linear resonant actuator)e hoʻohana i kahi coil leo e hoʻokele i kahi nuipa, e hana ana ma ke ʻano brushless. Hoʻemi kēia hoʻolālā i ka pilikia o ka hāʻule ʻana no ka mea ʻo ka ʻāpana neʻe wale nō i hiki ke ʻaʻahu ʻia ʻo ia ka pūnāwai. Hana kēia mau pūnāwai i ka loiloi finite element piha (FEA) a hana i loko o kā lākou pae non-fatigue. Pili nui nā ʻano hāʻule i ka ʻelemakule o nā ʻāpana kūloko ma muli o ka emi ʻana o ka ʻaʻahu mechanical.
(ʻO ka finite element analysis (FEA) ka hoʻohana ʻana i nā helu ʻana, nā kumu hoʻohālike a me nā simulations e wānana a hoʻomaopopo pehea e hana ai kahi mea ma lalo o nā kūlana kino like ʻole.)
ʻO ka hopena, ʻoi aku ka lōʻihi o ka manawa awelika o nā mīkini haʻalulu LRA e hāʻule ai (MTTF) ma mua o nā motika haʻalulu eccentric rotating mass (ERM) maʻamau.
ʻOi aku ka lōʻihi o ke ola o nā motika LRA ma mua o nā motika ʻē aʻe.ʻO ke ola ma lalo o ke kūlana o 2 kekona ma / 1 kekona ma waho he hoʻokahi miliona mau pōʻaiapuni.
He kūpono ka linear vibration actuator me nā ʻano mea uila like ʻole, e like me nā mea hiki ke komo, nā mea lapaʻau, a me nā mea hoʻokele pāʻani.
ʻAe, pono kahi mea hoʻokele motika e hoʻokele i nā motika haʻalulu linear. Hiki i ka mea hoʻokele motika ke kōkua i ka kaohi ʻana i ka ikaika o ka haʻalulu a pale i ka motika mai ka hoʻouka nui ʻana.
Hiki ke huli ʻia ka mōʻaukala o nā linear resonant actuators (LRA) i ka hoʻohana ʻana i nā mīkini haʻalulu eccentric rotating mass (ERM) i nā mea uila pilikino. Ua hoʻolauna mua ʻo Motorola i nā mīkini haʻalulu i ka makahiki 1984 ma kāna mau pagers BPR-2000 a me OPTRX. Hāʻawi kēia mau mīkini i kahi ala mālie e hoʻomaopopo ai i ka mea hoʻohana ma o ka haʻalulu. I ka hala ʻana o ka manawa, ʻo ka pono no nā hopena haʻalulu hilinaʻi a paʻa i alakaʻi i ka hoʻomohala ʻana o nā linear resonant actuators. ʻIke ʻia hoʻi he linear actuators, ʻoi aku ka hilinaʻi o nā LRA a pinepine ka liʻiliʻi ma mua o nā mīkini ERM kuʻuna. Ua lilo koke lākou i mea kaulana i nā noi haptic feedback a me nā makaʻala haʻalulu kumu. I kēia mau lā, hoʻohana nui ʻia ʻo LRA i nā mea uila like ʻole e like me nā kelepona paʻalima, nā kelepona akamai, nā mea hiki ke komo, a me nā mea liʻiliʻi ʻē aʻe e pono ai ka hana haʻalulu. ʻO ko lākou nui a me ka hilinaʻi e kūpono ai lākou no ka hāʻawi ʻana i ka manaʻo tactile e hoʻomaikaʻi i ka ʻike mea hoʻohana. Ma keʻano holoʻokoʻa, ua hoʻololi ka ulu ʻana mai nā mīkini ERM a i nā LRA i nā mea uila pilikino i ke ʻano o ka hāʻawi ʻana o nā mea i ka manaʻo i nā mea hoʻohana, e hāʻawi ana i kahi ʻike haʻalulu i ʻoi aku ka maikaʻi a me ka maikaʻi.
ʻAʻole e like me nā mīkini haʻalulu DC palaki kuʻuna, pono nā linear resonant actuators (LRA) i kahi hōʻailona AC ma ke alapine resonant e hana pono ai. ʻAʻole hiki ke hoʻokele pololei ʻia lākou mai kahi kumu uila DC. Loaʻa pinepine nā alakaʻi o kahi LRA i nā kala like ʻole (ʻulaʻula a uliuli paha), akā ʻaʻohe o lākou polarity. No ka mea, ʻo ka hōʻailona hoʻokele he AC, ʻaʻole DC.
I ka hoʻohālikelike ʻana me nā mīkini haʻalulu eccentric rotating mass (ERM) brushed, ʻo ka hoʻoponopono ʻana i ka amplitude o ka voltage drive ma ka LRA e hoʻopilikia wale i ka ikaika i hoʻopili ʻia (i ana ʻia ma G-force) akā ʻaʻole i ka alapine haʻalulu. Ma muli o kona bandwidth haiki a me ke kumu kiʻekiʻe o ka maikaʻi, ʻo ka hoʻopili ʻana i nā alapine ma luna a ma lalo paha o ka alapine resonant o ka LRA e hopena i ka emi ʻana o ka amplitude haʻalulu, a i ʻole ʻaʻohe haʻalulu inā e haʻalele nui ia mai ka alapine resonant. ʻO ka mea nui, hāʻawi mākou i nā LRA broadband a me nā LRA e hana ana ma nā alapine resonant he nui.
Inā he mau koi kikoʻī kāu a i ʻole nā nīnau hou aku, e ʻoluʻolu e hoʻomaopopo mai iā mākou a e hauʻoli mākou e kōkua iā ʻoe.
ʻO RA (Linear Resonant Actuator) kahi actuator e hoʻoulu ai i ka haʻalulu. Hoʻohana pinepine ʻia ia i nā polokalamu e like me nā kelepona akamai a me nā mea hoʻokele pāʻani e hāʻawi i ka manaʻo tactile. Hana ʻo LRA ma ke kumumanaʻo o ka resonance.
Aia ia i nā wili a me nā makeneka. Ke hele ke au uila ma o ke wili, hana ia i kahi kahua makeneka e launa pū me ka makeneka. ʻO kēia launa pū ʻana ke kumu o ka neʻe wikiwiki ʻana o ka makeneka i mua a i mua.
Ua hoʻolālā ʻia ka LRA i ke ʻano e hiki ai i kona alapine resonant kūlohelohe i ka wā o kēia neʻe ʻana. Hoʻonui kēia resonance i nā haʻalulu, e maʻalahi ai i nā mea hoʻohana ke ʻike a ʻike. Ma ka kaohi ʻana i ke alapine a me ka ikaika o ke au alternating i hala ma o ke coil, hiki i ka hāmeʻa ke hana i nā pae like ʻole a me nā ʻano o nā haʻalulu.
ʻAe kēia i nā ʻano hopena haptic like ʻole, e like me nā haʻalulu hoʻolaha, nā manaʻo hoʻopā, a i ʻole nā ʻike pāʻani immersive. Ma keʻano holoʻokoʻa, hoʻohana nā LRA i nā mana electromagnetic a me nā loina resonance e hana i nā haʻalulu e hana i ka neʻe i kāohi ʻia a ʻike ʻia.
Pono ʻoe e hāʻawi i nā kikoʻī kumu o ka motika, e like me: Nā Ana, Nā Hana, Voltage, Speed. ʻOi aku ka maikaʻi o ka hāʻawi ʻana i nā kiʻi prototype noi iā mākou inā hiki.
Loaʻa i kā mākou mau mīkini DC mini nā noi ma nā ʻoihana like ʻole e like me nā mīkini home, nā lako keʻena, ke olakino, nā mea pāʻani kiʻekiʻe, nā ʻōnaehana panakō, nā ʻōnaehana automation, nā mea hiki ke komo, nā lako uku, a me nā laka puka uila. Ua hoʻolālā ʻia kēia mau mīkini e hāʻawi i ka hana hilinaʻi a me ka pono i kēia mau noi like ʻole.
AnawaenaMotika Micro DC 6mm~12mm, Motika Uila, Motika Dc Palaki,Motika Dc ʻole palaki, Motika liʻiliʻi,motika laina, mīkini LRA,mīkini haʻalulu ʻole coreless cylinder, motika smt etc.
ʻIke hou aʻe e pili ana i nā mīkini haʻalulu laina LRA
1. Ka Moolelo o ka LRA (linear resonant actuator)
Ua hoʻomaka mua ʻia ka hoʻohana ʻana o nā mīkini haʻalulu ERM i nā mea uila pilikino e Motorola i ka makahiki 1984. ʻO nā pager BPR-2000 a me OPTRX kekahi o nā mea hana mua e hoʻokomo i kēia hiʻohiʻona, e hāʻawi ana i nā leka hoʻomaopopo kelepona leo ʻole a me ka pane haʻalulu liʻiliʻi i ka mea hoʻohana. I kēia lā, hāʻawi nā LRA (ʻike ʻia hoʻi he linear actuators) i ka hilinaʻi kiʻekiʻe i nā nui liʻiliʻi. Hoʻohana pinepine ʻia lākou i nā noi pane haptic a me nā hana hoʻāla haʻalulu kumu. Hoʻohana nui ʻia nā mīkini haʻalulu linear i nā kelepona paʻalima, nā kelepona akamai, nā mea hiki ke komo a me nā mea hana liʻiliʻi ʻē aʻe e pono ai nā hana haʻalulu.
2. IC Hoʻokele
Pono e hoʻohana ʻia ka motika linear micro alakaʻi LD0832 & LD0825 me kahi IC hoʻokele e like me ka TI DRV2604L a i ʻole DRV2605L. Kūʻai aku ʻo TI (Texas Instruments) i kahi papa loiloi me kēia chip IC ma luna. E nānā i ka loulou: https://www.ti.com/lsds/ti/motor-drivers/motor-haptic-driver-products.page
Inā makemake ʻoe i ka IC ʻoi aku ka maikaʻi o ke kumukūʻai, hiki iā mākou ke paipai iā ʻoe i nā mea hoʻolako Kina me ka hana like akā ke kumu kūʻai haʻahaʻa.
3. ʻO ka LRA ma ke ʻano he ʻāpana kaapuni
Ke hoʻohui ʻia nā motika LRA i loko o kahi kaapuni, hoʻomaʻalahi pinepine ʻia lākou ma mua o ko lākou kaapuni like, ʻoiai ke hoʻokele ʻia e kahi chip hoʻokele LRA i hoʻolaʻa ʻia e like me DRV2603. Ma ka hoʻopili ʻana i ka LRA i nā pine kūpono o kahi IC kū hoʻokahi, hiki i nā mea hoʻolālā a me nā ʻenekinia ke mālama i ka manawa a me ka nānā ʻana i nā ʻano ʻē aʻe o ka ʻōnaehana.
ʻOiai ka hana ʻana o ka EMF hope e nā LRA, hoʻohana ka nui o nā mea hoʻokele LRA i kēia hopena ma ke ʻano he ʻano ʻike. Ana kekahi IC mea hoʻokele i ka EMF hope. Hoʻohana lākou i kēia ʻike e hoʻoponopono i ke alapine (frequency) o ka hōʻailona hoʻokele e ʻike i ka resonance. Hiki iā ia ke hana i loko o nā palena a me nā pae kokoke me ka nānā ʻole i nā kūlana a i ʻole ka makahiki.
He mea nui e hoʻomaopopo he brushless maoli nā motika LRA. ʻAʻole lākou e ʻeha i nā hoʻokuʻu electromagnetic e pili ana me ka commutator arcing i nā motika DC ERM. ʻO kēia ʻano, e like me nā motika ERM brushless, ma ke ʻano laulā e kūpono ai nā LRA no nā lako i hōʻoia ʻia e ATEX.
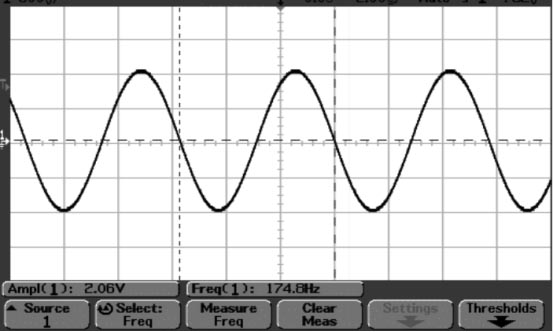
4. Ke hoʻokele nei i nā mea hoʻoikaika resonant linear / nā vibrators linear
Pono nā mea hoʻoluliluli linear LRA i kahi hōʻailona AC e hana ai, e like me nā mea hoʻolele leo. ʻOi aku ka maikaʻi o ka hoʻohana ʻana i kahi hōʻailona nalu sine ma ke alapine resonant, e like me ka mea i hōʻike ʻia ma ke kiʻi ma lalo nei.
ʻOiaʻiʻo, hiki ke hoʻololi ʻia ka amplitude o ke ʻano o ka nalu hoʻokele e hana i nā hopena manaʻo tactile holomua.
5. Hoʻolōʻihi ʻia ke ola no nā Vibrators Linear
ʻOkoʻa nā motika haʻalulu LRA mai ka hapa nui o nā motika haʻalulu ma muli o ka hoʻohana ʻana i kahi coil leo e hoʻokele i ka nuipa, e hoʻolilo iā lākou i mea brushless maikaʻi.
Hoʻemi kēia hoʻolālā i ka hiki ke hāʻule ka pūnāwai, kahi i hoʻohālikelike ʻia me ka hoʻohana ʻana i ka finite element analysis (FEA) a hana i loko o kahi ʻāpana luhi ʻole. No ka mea he liʻiliʻi ka ʻaʻahu mechanical a ua kaupalena ʻia ke ʻano hāʻule nui i ka ʻelemakule o nā ʻāpana kūloko, ʻoi aku ka lōʻihi o ka manawa waena i ka hāʻule ʻana (MTTF) i hoʻohālikelike ʻia me nā mīkini haʻalulu eccentric rotating mass (ERM) maʻamau.
E kūkākūkā me kāu alakaʻi Nā mea hana mīkini laina
Kōkua mākou iā ʻoe e pale i nā pilikia e hāʻawi i ka maikaʻi a me ka waiwai o kāu mau mīkini micro LRA e pono ai, i ka manawa kūpono a ma ke kālā.