Chaw Tsim Khoom Tsav Tsheb LRA (Linear Resonant Actuator)
Lub tuam txhab Leader MicroLRA vibrator tsim kev cothiabkev tawm tswv yim haptichauv Z-kev taw qhia thiab X-kev taw qhia. Nws tau lees paub tias ua tau zoo dua ERMs hauv lub sijhawm teb thiab lub neej ntev, ua rau nws zoo rau lub xov tooj ntawm tes thiab cov cuab yeej siv co.
Lub cev muaj zog LRA vibration xa cov kev co zaus ruaj khov thaum siv hluav taws xob tsawg dua thiab txhim kho qhov zoo ntawm kev paub haptic rau cov neeg siv. Nws ua tiav kev co ntsug los ntawm lub zog electromagnetic thiab hom resonance, uas ua rau muaj kev co sine wave.
Ua ib tug kws tshaj lijme mekab ncaj Lub cev muaj zog tsim khoom thiab chaw muag khoom hauv Suav teb, peb tuaj yeem ua tau raws li cov neeg siv khoom xav tau nrog kev cai zoo linear motor. Yog tias koj xav tau, txais tos hu rau Leader Micro.
Peb Tsim Khoom Dab Tsi
Lub LRA (Linear Resonant Actuator) lub cev muaj zog yog lub cev muaj zog AC uas tsav los ntawm kev co nrog lub cheeb feem ntau ntawm8 hli, uas feem ntau siv rau hauv cov ntawv thov haptic feedback. Piv rau cov cav co ib txwm muaj, LRA vibration motors siv hluav taws xob ntau dua. Nws muab cov lus teb meej dua nrog lub sijhawm pib / nres sai.
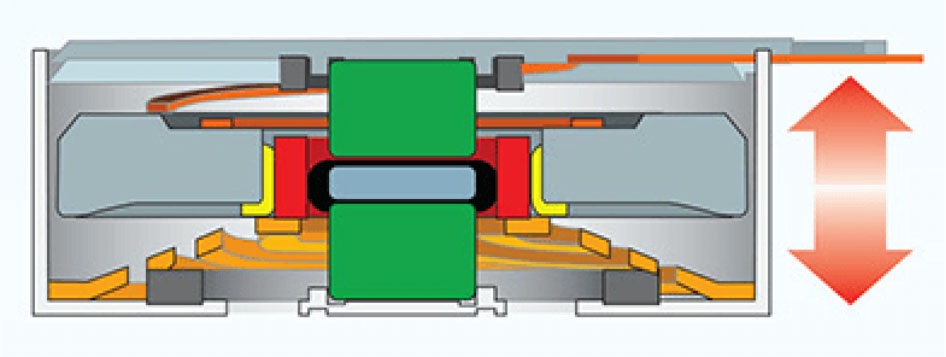
Peb lub tshuab ua kom lub zog txav tau zoo li lub npib (LRA) yog tsim los kom txav mus raws Z-axis, perpendicular rau qhov chaw ntawm lub cev muaj zog. Qhov kev co Z-axis tshwj xeeb no zoo heev rau kev xa cov kev co hauv cov ntawv thov hnav tau. Hauv cov ntawv thov siab-ntseeg tau (Hi-Rel), lub cev muaj zog LRA tuaj yeem yog lwm txoj hauv kev zoo rau cov tshuab ua kom lub zog txav tau tsis txhuam vim tias tsuas yog cov khoom sab hauv uas yuav hnav thiab ua tsis tiav yog lub caij nplooj ntoo hlav.
Peb lub tuam txhab cog lus tias yuav muab cov linear resonant actuator zoo nrog cov lus qhia tshwj xeeb kom haum rau ntau yam kev xav tau ntawm peb cov neeg siv khoom. Xav tau cov kev daws teeb meem uas tsis hnyav thiab ua haujlwm tau zoo? Tshawb nrhiav seb peb...cov cav tsis muaj zogxa qhov ceev thiab qhov tseeb tshwj xeeb!
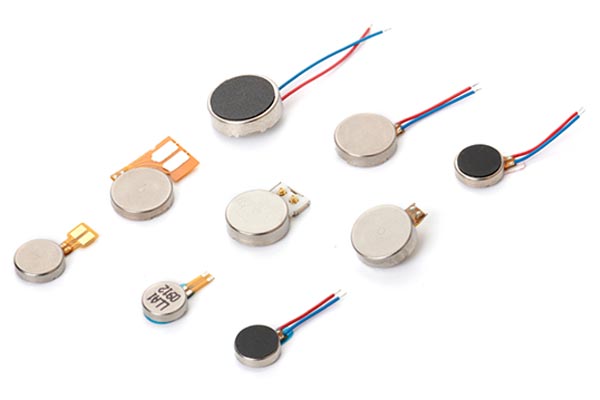
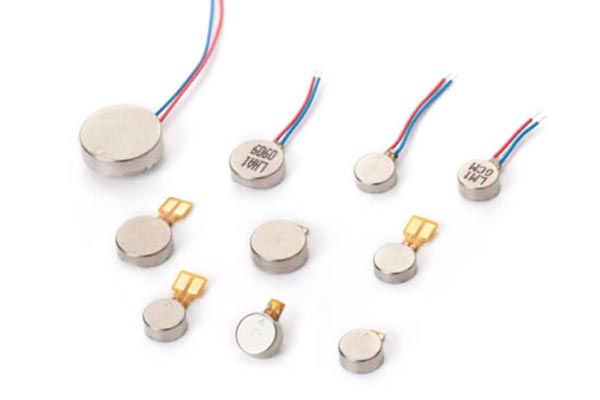
Z-axis LRA Vibration Motors: Kev daws teeb meem Tactile me me, siv tau ntau yam
Peb liZ-axis vibration motors(los ntawm LEADER) xa cov lus teb haptic meej, teb tau zoo hauv cov hneev taw me me - zoo tagnrho rau cov khoom siv uas qhov chaw nyob ntawm tus nqi siab.
Muaj nyob rau hauv ntau qhov kev teeb tsa (piv txwv li,6 hli × 2.5 hli), cov vibration motors no txhawb kev sib koom ua ke yooj ywm (nrogFPCB lossis kev sib txuas hlau) kom haum rau ntau yam khoom tsim (cov khoom siv ntse, cov khoom siv me me, cov khoom siv hluav taws xob uas nqa tau yooj yim).
Txhua tus qauv sib npaug zos me me nrog kev ua haujlwm ntawm kev co, ua rau lawv yog qhov kev xaiv zoo rau cov khoom siv me me, xav tau ntau.







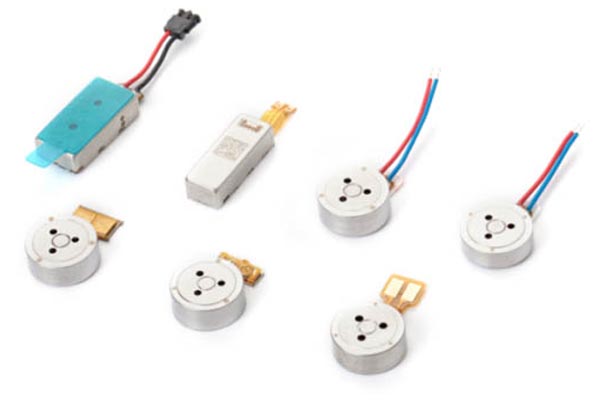
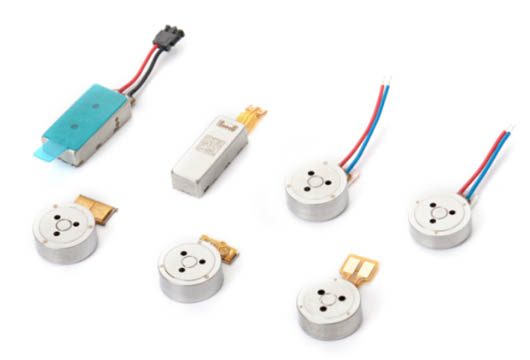
X-axis Vibration Motors: Slim, High-Performance Haptic Solutions
LEADER lub cev muaj zog X-axis vibration xa khoomcov lus teb tactile uas tsom mus rau, sib xws hauv daim ntawv qis-profile, rectangular-zoo meej rau cov khoom siv uas xav tau kev sib xyaw ua ke tiaj tus, txuag qhov chaw.
Muaj nyob rau hauv8 × 9 hli (LD0809AA)thiab8 × 15 hli (LD0815AA) qhov ntau thiab tsawg, cov LRA vibration motors no tsim kev co X-direction txhim khu kev qha, ua rau lawv zoo tagnrho rau cov khoom nyias nyias zoo licov xov tooj ntse, ntsiav tshuaj, thiab cov khoom siv ntse nyias nyias.
Lawv txoj kev tsim qauv me me thiab yooj yim ua kom yooj yim haum yam tsis muaj kev cuam tshuam rau kev teb haptic.


| Cov Qauv | Loj (hli) | Qhov Voltage (V) | Tam Sim No (mA) | Zaus | Hluav taws xob | Kev nrawm dua |
| LD0825 | φ8 * 2.5 hli | 1.8VrmsACnthwv dej sine | 85mA Max | 235±5Hz | 0.1~1.9 Vrms AC | 0.6Grms Min |
| LD0832 | φ8 * 3.2 hli | 1.8VrmsACnthwv dej sine | 80mA Max | 235±5Hz | 0.1~1.9 Vrms AC | 1.2Grms Min |
| LD4512 | 4.0Wx12L 3.5Hmm | 1.8VrmsACnthwv dej sine | 100mA Max | 235±10Hz | 0.1~1.85 Vrms AC | 0.30Grms Min |
| LD2024 | Dia 20mmx24T | 1.2VmsAc Sine Wave | 200mA Max | 65±10Hz | 0.1~1.2VrmsAC | 2.5 ± 0.5G |
Tseem tsis tau nrhiav tau yam koj tab tom nrhiav? Hu rau peb cov kws pab tswv yim kom paub ntau yam khoom muaj.
Daim Ntawv Thov
Cov linear resonant actuators muaj qee qhov zoo kawg nkaus: lub neej ntev heev, lub zog vibrating hloov kho tau, teb sai, suab nrov tsawg. Nws yog siv dav rau cov khoom siv hluav taws xob uas xav tau haptic feedbacks xws li smartphones, wearables, VR headsets thiab gaming consoles, txhim kho cov kev paub ntawm tus neeg siv.
Cov Xov Tooj Ntawm Tes
Lub cev muaj zog linear vibration feem ntau siv rau hauv cov xov tooj ntse rau kev tawm tswv yim haptic, xws li muab cov lus teb tactile rau kev ntaus ntawv thiab nias cov nyees khawm. Cov neeg siv tuaj yeem hnov cov lus teb tseeb los ntawm lawv cov ntiv tes, uas txhim kho qhov tseeb ntawm kev ntaus ntawv thiab txo qhov yuam kev ntaus ntawv. Tsis tas li ntawd, lra haptic motor tuaj yeem muab cov lus ceeb toom vibration rau cov ntawv ceeb toom, kev hu xov tooj thiab kev ceeb toom. Nws tuaj yeem txhim kho kev koom tes ntawm cov neeg siv tag nrho.

Cov Khoom Siv Hnav Tau
Kev co ntawm lub cev muaj zog linear kuj pom muaj nyob rau hauv cov khoom siv hnav tau, xws li smartwatches, fitness trackers thiab lwm yam khoom siv portable. Cov linear resonant actuators tuaj yeem muab kev ceeb toom kev co rau cov xov tooj hu tuaj, cov lus, email lossis lub tswb, tso cai rau cov neeg siv kom sib txuas lus nrog lub ntiaj teb yam tsis cuam tshuam lawv cov dej num txhua hnub. Tsis tas li ntawd, micro linear motor tuaj yeem muab cov lus teb haptic rau kev taug qab kev noj qab haus huv, xws li taug qab cov kauj ruam, calories thiab lub plawv dhia.

Cov Khoom Siv VR
Cov motors linear tshwj xeeb kuj tseem tuaj yeem pom muaj nyob rau hauv VR headsets, xws li Oculus Rift lossis HTC Vive, rau kev nkag mus rau hauv kev xav. Cov motor linear tshwj xeeb tuaj yeem xa ntau yam kev co uas tuaj yeem ua rau muaj ntau yam kev xav hauv kev ua si, xws li kev tua, kev ntaus lossis kev tawg. lra motors ntxiv lwm txheej ntawm qhov tseeb rau kev paub txog kev muaj tiag virtual.

Cov Khoom Siv Ua Si
Cov cav linear uas tsim tshwj xeeb kuj siv rau hauv cov maub los ua si rau kev tawm tswv yim haptic. Cov cav no tuaj yeem muab kev tawm tswv yim vibration rau cov xwm txheej tseem ceeb hauv kev ua si, xws li kev ntaus yeej, kev sib tsoo lossis lwm yam kev ua si. Lawv tuaj yeem muab kev paub txog kev ua si zoo dua rau cov neeg ua si. Cov kev co no kuj tseem tuaj yeem muab cov cim qhia rau cov neeg ua si, xws li ceeb toom lawv thaum riam phom npaj tua lossis rov qab thauj khoom.

Hauv kev xaus lus, kev siv cov linear actuator vibration motors yog dav dav, xws li los ntawm smartphone mus rau gaming consoles, thiab nws tuaj yeem txhim kho cov kev paub ntawm cov neeg siv hauv ntau yam kev siv.
Yuav ua li cas LRA Motors tsim kev co
Peb cov LRA motors nyias nyias, me me, ua tau los ntawm kev tsim qauv tshwj xeeb thiab cov thev naus laus zis patented - kev tsim kho tshiab uas ua rau muaj kev co muaj zog hauv daim ntawv ultra-miniaturized.
Yuav ua li cas LRA Motors tsim kev co
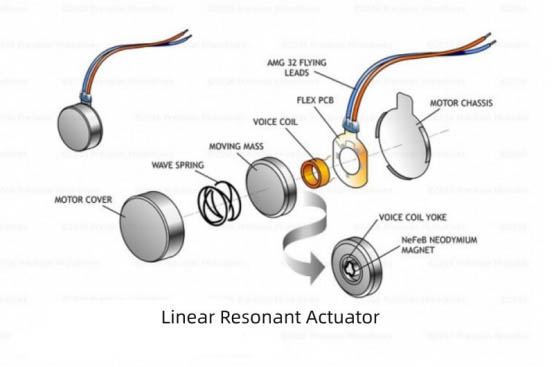
Sab hauv LRA, lub suab coil tseem ruaj khov thaum cuam tshuam nrog lub zog sib nqus uas txav tau. Thaum qhib, lub coil tsav lub zog no kom co mus rau saum thiab nqis tawm tsam cov caij nplooj ntoos hlav sab hauv. Qhov kev txav mus los rov ua dua no ua rau tag nrho LRA hloov chaw, ua rau cov neeg siv hnov qhov kev co.
Lub tshuab no zoo sib xws nrog cov thev naus laus zis hais lus: zoo li cov hais lus (uas hloov cov teeb liab AC mus rau hauv huab cua hloov mus rau lwm qhov kom tsim tau suab), LRAs txhais cov zaus hloov pauv tam sim no (AC) thiab qhov loj me mus rau hauv kev txav mus los ntawm lub cev muaj zog sib nqus ceev ceev. Txawm li cas los xij, tsis zoo li cov hais lus (uas ua haujlwm hla ntau qhov zaus), LRA motors tau raug kho kom raug rau cov zaus tshwj xeeb - ua rau lawv zoo tagnrho rau cov ntawv thov haptic feedback.
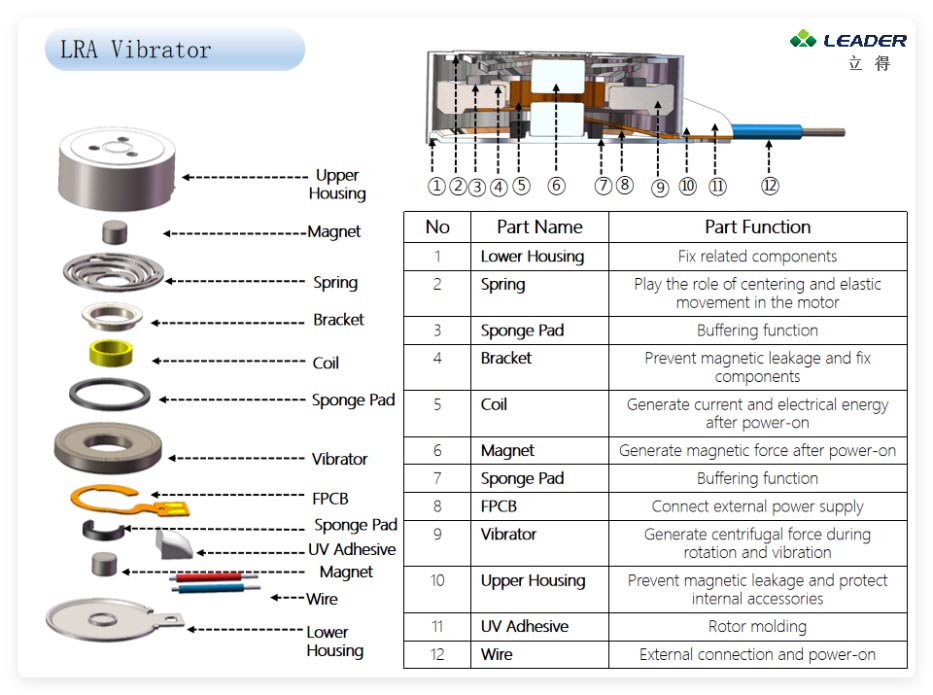
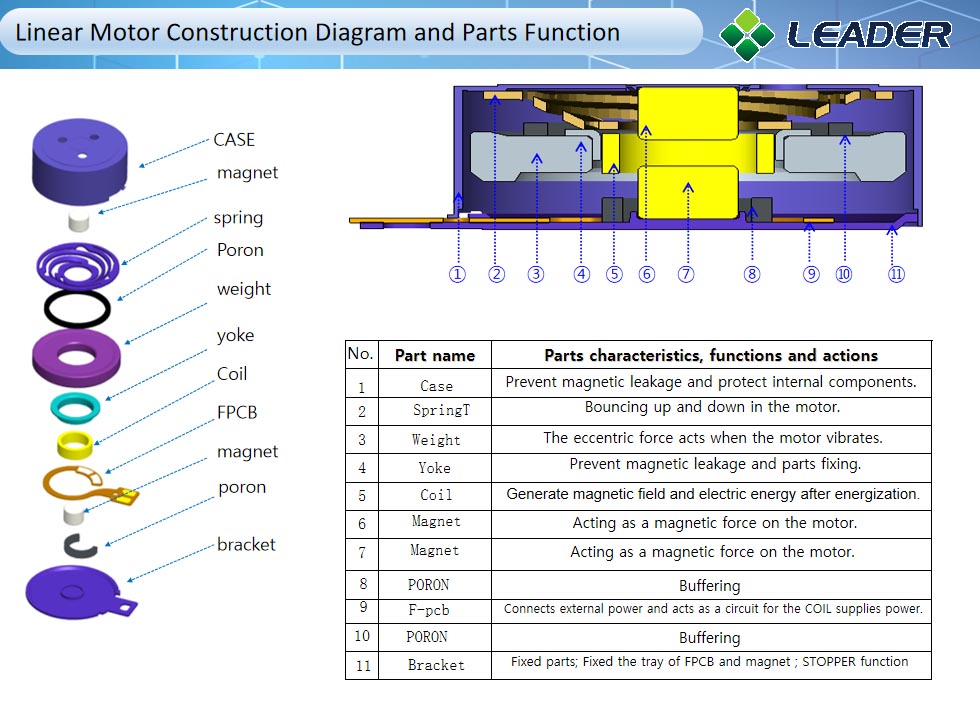
Cov Cheebtsam ntawm Linear Resonant Actuator
Cov Tsav Tsheb Linear Vibration: Cov Lus Teb Sai Dua, Kev Tswj Xyuas Kom Tseeb & Kev Nres Ntse
Cov tshuab hluav taws xob linear vibration (LRAs) sawv tawm rau lawv qhov kev pib ua haujlwm sai heev - feem ntau ncaws tawm hauv 5 txog 10 milliseconds - qhov sib txawv ntawm qhov teb qeeb ntawm eccentric rotating mass (ERM) motors.
Qhov kev ua kom sai no yog los ntawm lub zog sib nqus lub zog tam sim ntawd: thaum tam sim no ntws los ntawm lub suab coil ntawm lub cuab yeej, lub zog sib nqus teb tam sim ntawd.
Los ntawm kev sib piv, ERM motors xav tau sijhawm kom mus txog qhov ceev ua haujlwm ua ntej tsim kev co kom raug; txawm tias thaum overdriven rau kev nrawm dua, ERMs feem ntau xav tau 20-50 milliseconds kom ntaus qhov kev co xav tau.
Cov yam ntxwv thiab kev ua haujlwm ntawm LRA Tsav Tsheb
Cov yam ntxwv:
- Kev ua haujlwm hluav taws xob tsawg:Lub cev muaj zog LRA muaj qhov ua haujlwm hluav taws xob tsawg nrog 1.8v, ua rau nws zoo tagnrho rau cov khoom siv hluav taws xob me me uas xav tau kev siv hluav taws xob tsawg.
- Me me:Qhov loj me me ntawm LRA lub cev muaj zog tso cai rau nws siv rau hauv cov khoom siv uas muaj qhov chaw tsawg.
- Lub sijhawm pib/nres sai: Lub cev muaj zog LRA muaj lub sijhawm pib/nres sai, ua rau nws muab cov lus teb haptic meej dua rau tus neeg siv.
- Kev ua haujlwm suab nrov tsawg:Cov motors no khiav ntsiag to, uas yog qhov tseem ceeb rau cov khoom siv uas xav tau tsawg kawg nkaus suab nrov.
- Cov zaus thiab qhov siab uas hloov kho tau raws li qhov xav tau:Cov zaus thiab qhov loj ntawm LRA lub cev muaj zog tuaj yeem hloov kho kom haum rau cov kev xav tau tshwj xeeb ntawm cov khoom siv.
Cov Haujlwm:
- LRA lub cev muaj zog xa cov lus teb haptic meej thiab ua haujlwm tau zoo los txhim kho kev paub ntawm tus neeg siv nrog lub cuab yeej.
-Qhov kev xav kov uas muab los ntawm LRA lub cev muaj zog uas txhim kho tus neeg siv kev paub nrog lub cuab yeej, ua rau nws lom zem dua rau siv.
- LRA lub cev muaj zog siv hluav taws xob tsawg, ua rau lawv zoo tagnrho rau cov khoom siv tsim los txuag hluav taws xob.
- LRA motors muab kev tswj hwm zoo dua thiab sib xws dua li cov motors co ib txwm muaj.
- Qhov zaus thiab qhov loj ntawm LRA lub cev muaj zog tuaj yeem hloov kho kom ua tau raws li cov lus qhia ntawm cov khoom siv sib txawv.
Cov ntsiab lus tseem ceeb rau kev tsim qauv LRA suav nrog:
Kev tsim kho lub caij nplooj ntoos hlav & kev tshuaj xyuas kev ntxhov siab (kom sib npaug qhov yooj ywm thiab kev ruaj khov)
Kev ua kom zoo dua ntawm lub zog hluav taws xob (rau kev tsim lub zog zoo)
Kev tswj lub zog co (kom ntseeg tau tias muaj kev ua haujlwm tas mus li thiab lub neej ntev)
Ib qho kev xav tseem ceeb rau LRAs yog lawv lub sijhawm nres ntuj: vim yog lub zog kinetic khaws cia rau hauv cov caij nplooj ntoos hlav sab hauv thaum lub sijhawm ua haujlwm, lawv yuav siv sijhawm txog li300 millisecondskom ntsiag to ntawm lawv tus kheej. Txawm li cas los xij, qhov no tuaj yeem daws tau nrog kev nres tsheb nquag: los ntawm kev hloov theem ntawm AC teeb liab muab rau lub actuator los ntawm180 degrees, lub zog tawm tsam raug tsim los tawm tsam lub caij nplooj ntoos hlav qhov kev co - nres qhov kev co hauv qhov kwv yees li10 millisecondsrau kev tswj hwm kom meej, raws li qhov xav tau.
Linear Resonant Actuator: Kev co zoo los ntawm Resonance
Tsis zoo li cov qauv tsim ib txwm uas xa lub zog ntawm lub suab mus rau saum npoo, peb lub linear resonant actuator (LRA) txo kev siv hluav taws xob los ntawm kev siv lub zog resonant ntawm nws lub caij nplooj ntoos hlav sab hauv. Thaum lub suab coil tsav lub zog sib nqus kom oscillate ntawm lub caij nplooj ntoos hlav lub zog resonant ntuj, lub cuab yeej ua kom lub zog vibration amplitude ntau dua - xa cov lus teb tactile muaj zog dua nrog lub zog tsawg dua.
Siv lub zog AC, LRA no cia koj hloov kho qhov zaus thiab qhov loj ntawm kev co kom zoo dua qub. Qhov kev ywj pheej no ua rau nws txawv ntawm ERM motors, qhov twg zaus thiab qhov loj sib txuas ua ke (kev hloov ib qho hloov pauv lwm qhov).
Daim Ntawv Thov Txuag Hluav Taws Xob Hauv Lub Ntiaj Teb Tiag: Cov Khoom Siv Hnav Tau Zoo
Rau cov smartwatches uas siv roj teeb (uas vam khom cov khoom me me, tsis muaj zog), peb LRA tus qauv tsim resonant txiav cov zog cuam tshuam los ntawm kev co los ntawm30%+ piv rau cov ERMs ib txwm muaj. Piv txwv li: lub cuab yeej ntsuas kev noj qab haus huv siv LRA no tuaj yeem tswj tau cov lus teb "kev ceeb toom nrov nrov" thaum lub sijhawm ntev roj teeb txhua hnub los ntawm1.5 teev-kev txhawb nqa tseem ceeb rau cov khoom siv uas txhua mAh suav nrog.
Hauv cov tswj hwm touchscreen (siv rau hauv cov vaj huam sib luag kev lag luam), LRA qhov kev tswj hwm zaus / amplitude ywj pheej kuj txo cov khib nyiab zog tsis tsim nyog: nws xa cov lus teb "nias" lossis "haptic texture" meej tsuas yog thaum raug cuam tshuam, es tsis txhob khiav ntawm qhov tso zis ruaj khov (thiab feem ntau overpowered) zoo li ERMs.
Cov txiaj ntsig tseem ceeb ntawm LRA Vibration Motors
Cov khau raj teb ceev ceev heev nce mus rau hauvtsuas yog 5–10ms (sai dua li ERM motors)), ua kom muaj kev tawm tswv yim haptic tam sim ntawd, meej rau kev sib cuam tshuam raws sijhawm (piv txwv li, kov lub vijtsam kov, ceeb toom ceeb toom).
Kev Siv Hluav Taws Xob Zoo Siv lub caij nplooj ntoos hlav resonance los ua kom lub zog co loj dua nrog kev siv hluav taws xob tsawg kawg nkaus - txiav kev siv hluav taws xob los ntawm30%+ piv rau. cov cav ib txwm muaj, txuas lub roj teeb rau cov khoom siv nqa tau (hnav tau, smartphones).
Kev Tswj Xyuas Cov Kev Cai Ywj Pheej Tso cai rau kev hloov kho qhov zaus thiab qhov loj ntawm kev co,txhawb nqa cov kev paub txog tactile uas hloov kho tau (piv txwv li, qhov sib txawv ntawm "nias" vs. "buzz" feedback) uas ERM motors tsis tuaj yeem sib phim.
Tsim qauv me me thiab tsis hnyav heev, ua rau nws yooj yim nqa thiab txuag chaw (piv txwv li, cov kab uas hla me me/tuab) haum zoo rau cov khoom me me (cov smartwatches, pob ntseg) yam tsis muaj kev cuam tshuam kev ua tau zoo.
Kev Nres Tsheb Kom Zoo Tshaj Plaws Yuav tiv thaiv kev co hauv ~10ms(ntawm180°AC teeb liab theem hloov pauv), tshem tawm qhov resonance uas nyob ntev thiab ua kom muaj kev txiav tawm ntawm cov lus teb rov qab raws li qhov xav tau.
Cov Cai Txog Linear Resonance Actuator
Peb lub tuam txhab tau txais ntau daim ntawv pov thawj patent ntsig txog peb cov thev naus laus zis LRA (Linear Resonant Actuator) lub cev muaj zog, uas qhia txog peb txoj kev tsim kho tshiab thiab kev tshawb fawb ua tus thawj coj hauv kev lag luam. Cov ntawv pov thawj no npog ntau yam ntawm cov thev naus laus zis vibration actuator, suav nrog nws txoj kev tsim qauv, cov txheej txheem tsim khoom thiab daim ntawv thov. Peb cov thev naus laus zis patent ua rau peb muab cov cav LRA zoo, txuag hluav taws xob thiab hloov kho tau raws li cov kev xav tau tshwj xeeb ntawm peb cov neeg siv khoom.
Ib qho ntawm cov ntawv pov thawj yog hais txog kev tsim lub cev muaj zog linear vibration nrog lub amplitude loj. Ib lub damping pad tau teeb tsa rau sab tod ntawm sab mounting ntawm lub stator sib dhos thiab lub rotor sib dhos. Lub damping pad tuaj yeem zam kev sib tsoo nrog lub tsev thaum lub rotor sib dhos co hauv lub tsev, uas ua rau lub neej ua haujlwm ntawm lub cev muaj zog linear vibration ntev dua. Ib lub voj voog magnetic tau muab tso rau sab nraud ntawm lub kauj kom nce lub amplitude ntawm lub cev muaj zog linear vibration. Nws kuj tseem tuaj yeem ua kom zoo dua qhov kev paub haptic thaum siv cov khoom siv hluav taws xob uas muaj cov motors linear vibration.
Zuag qhia tag nrho, peb cov thev naus laus zis LRA uas tau txais patent ua rau peb txawv ntawm lwm cov neeg ua lag luam hauv kev lag luam, ua rau peb muab cov khoom lag luam zoo, tsim kho tshiab thiab txuag hluav taws xob rau peb cov neeg siv khoom. Peb tseem cog lus tias yuav tsav tsheb tsim kho tshiab, thiab muab cov kev daws teeb meem tshiab los txhim kho kev paub ntawm cov neeg siv khoom hauv cov khoom siv hluav taws xob.
Tau Txais Micro LRA Motors Hauv Ntau Kauj Ruam
Cov Lus Nug Txog Linear Haptic Motor
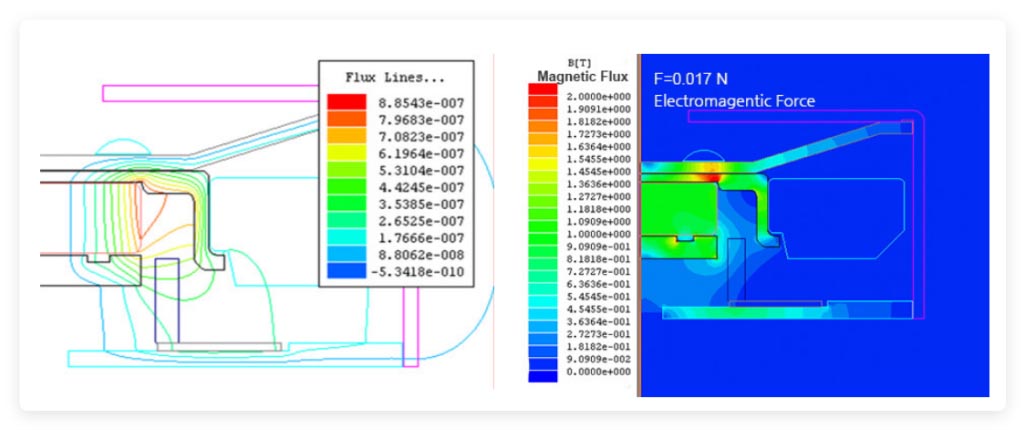
Nyob rau hauv sib piv raukev co motors, uas feem ntau siv electromechanical commutation,LRA (linear resonant actuator) vibration motorssiv lub suab coil los tsav lub cev loj, ua haujlwm hauv txoj kev tsis txhuam. Qhov kev tsim no txo qhov kev pheej hmoo ntawm kev ua tsis tiav vim tias tsuas yog qhov txav mus los uas yuav hnav yog lub caij nplooj ntoos hlav. Cov caij nplooj ntoos hlav no dhau los ntawm kev tshuaj xyuas cov ntsiab lus finite (FEA) thiab ua haujlwm hauv lawv qhov tsis qaug zog. Cov hom kev ua tsis tiav feem ntau yog cuam tshuam nrog kev laus ntawm cov khoom sab hauv vim txo qis kev hnav khoom siv.
(Kev tshuaj xyuas cov khoom kawg (FEA) yog kev siv cov kev xam, cov qauv thiab kev simulations los kwv yees thiab nkag siab tias ib yam khoom yuav ua li cas nyob rau hauv ntau yam xwm txheej ntawm lub cev.)
Yog li ntawd, LRA vibration motors muaj lub sijhawm ntev dua rau kev ua tsis tiav (MTTF) dua li cov tshuab hluav taws xob brushed eccentric rotating mass (ERM) vibration.
Feem ntau, LRA Motors muaj lub neej ntev dua li lwm cov motors.Lub neej ua haujlwm nyob rau hauv 2 vib nas this rau / 1 vib nas this tawm yog ib lab lub voj voog.
Lub linear vibration actuator yog sib xws nrog ntau yam khoom siv hluav taws xob, xws li cov khoom siv hnav tau, cov khoom siv kho mob, thiab cov maub los ua si.
Yog, yuav tsum muaj tus tsav tsheb los ua haujlwm rau cov cav linear vibration. Tus tsav tsheb kuj tseem tuaj yeem pab tswj qhov muaj zog ntawm kev co thiab tiv thaiv lub cav kom tsis txhob muaj kev thauj khoom ntau dhau.
Keeb kwm ntawm cov linear resonant actuators (LRA) tuaj yeem taug qab mus rau kev siv cov eccentric rotating mass (ERM) vibration motors hauv cov khoom siv hluav taws xob tus kheej. Motorola thawj zaug qhia txog vibration motors hauv xyoo 1984 hauv nws cov BPR-2000 thiab OPTRX pagers. Cov motors no muab txoj hauv kev ntsiag to los ceeb toom tus neeg siv los ntawm kev co. Raws li lub sijhawm dhau los, qhov xav tau ntau dua thiab compact vibration daws teeb meem ua rau kev tsim cov linear resonant actuators. Kuj tseem hu ua linear actuators, LRAs yog qhov txhim khu kev qha dua thiab feem ntau me dua li cov ERM motors ib txwm muaj. Lawv sai sai tau nrov hauv haptic feedback daim ntawv thov thiab cov lus ceeb toom vibration yooj yim. Niaj hnub no, LRA yog siv dav hauv ntau yam khoom siv hluav taws xob xws li xov tooj ntawm tes, smartphones, cov khoom siv hnav, thiab lwm yam khoom siv me me uas xav tau kev ua haujlwm vibration. Lawv qhov loj me me thiab kev ntseeg siab ua rau lawv zoo tagnrho rau kev muab cov lus teb tactile los txhim kho kev paub ntawm tus neeg siv. Zuag qhia tag nrho, kev hloov pauv los ntawm ERM motors mus rau LRAs hauv cov khoom siv hluav taws xob tus kheej tau hloov pauv txoj hauv kev uas cov khoom siv muab cov lus teb rau cov neeg siv, muab kev paub txog kev co zoo dua thiab ua haujlwm tau zoo.
Tsis zoo li cov tshuab hluav taws xob brushed DC vibration motors ib txwm muaj, cov linear resonant actuators (LRA) xav tau lub teeb liab AC ntawm qhov zaus resonant kom ua haujlwm tau zoo. Lawv tsis tuaj yeem tsav ncaj qha los ntawm DC voltage qhov chaw. Cov xov hlau ntawm LRA feem ntau tuaj hauv ntau xim (liab lossis xiav), tab sis lawv tsis muaj polarity. Vim tias lub teeb liab tsav yog AC, tsis yog DC.
Tsis zoo li cov brushed eccentric rotating mass (ERM) vibration motors, kev kho qhov amplitude ntawm lub zog tsav hauv LRA tsuas yog cuam tshuam rau lub zog siv (ntsuas hauv G-force) tab sis tsis cuam tshuam rau qhov zaus vibration. Vim nws qhov bandwidth nqaim thiab qhov zoo, kev siv cov zaus siab dua lossis qis dua LRA qhov zaus resonant yuav ua rau qhov amplitude vibration txo qis, lossis tsis muaj kev co kiag li yog tias nws txawv ntawm qhov zaus resonant. Qhov tseem ceeb, peb muab broadband LRAs thiab LRAs ua haujlwm ntawm ntau qhov zaus resonant.
Yog tias koj muaj tej yam xav tau tshwj xeeb los yog muaj lus nug ntxiv thov qhia rau peb paub thiab peb yuav zoo siab pab koj.
RA (Linear Resonant Actuator) yog ib qho actuator uas tsim kev co. Nws feem ntau siv rau hauv cov khoom siv xws li smartphones thiab cov maub los ua si los muab cov lus teb tactile. LRA ua haujlwm ntawm lub hauv paus ntsiab lus ntawm resonance.
Nws muaj cov kauj thiab cov hlau nplaum. Thaum cov hluav taws xob hloov pauv hla lub kauj, nws tsim ib lub teb hlau nplaum uas cuam tshuam nrog cov hlau nplaum. Qhov kev cuam tshuam no ua rau cov hlau nplaum txav mus los sai sai.
Lub LRA tau tsim los kom nws ncav cuag nws qhov zaus resonant ntuj thaum lub sijhawm txav mus los no. Qhov resonance no ua rau kev co ntau ntxiv, ua rau lawv yooj yim dua rau cov neeg siv los ntes thiab pom. Los ntawm kev tswj qhov zaus thiab qhov muaj zog ntawm alternating tam sim no hla lub kauj, lub cuab yeej tuaj yeem tsim ntau qib thiab cov qauv ntawm kev co.
Qhov no tso cai rau ntau yam kev cuam tshuam haptic feedback, xws li kev co ceeb toom, kev kov rov qab, lossis kev ua si immersive. Zuag qhia tag nrho, LRAs siv cov zog electromagnetic thiab cov ntsiab cai resonance los tsim cov kev co uas tsim kev tswj hwm thiab kev txav mus los.
Koj yuav tsum muab cov lus qhia yooj yim ntawm lub cev muaj zog, xws li: Qhov Loj, Kev Siv, Voltage, Ceev. Nws zoo dua los muab cov duab kos qauv rau peb yog tias ua tau.
Peb cov mini DC motors pom tau siv rau ntau yam lag luam xws li cov khoom siv hauv tsev, cov khoom siv hauv chaw ua haujlwm, kev kho mob, cov khoom ua si zoo, cov txheej txheem hauv tuam txhab nyiaj, cov txheej txheem automation, cov khoom siv hnav tau, cov khoom siv them nqi, thiab cov xauv qhov rooj hluav taws xob. Cov motors no yog tsim los muab kev ua haujlwm txhim khu kev qha thiab ua haujlwm tau zoo hauv cov kev siv sib txawv no.
Txoj kab uas hla6mm ~ 12mm Dc Micro Tsav Tsheb, Lub Cev Muaj Zog Hluav Taws Xob, Txhuam Dc Tsav Tsheb,Tsis Txhuam DC Tsav Tsheb, Micro Tsav Tsheb,lub cev muaj zog linear, LRA lub cev muaj zog,lub tog raj kheej tsis muaj zog vibration Motor, smt lub cev muaj zog thiab lwm yam.
Paub Ntau Ntxiv Txog LRA Linear Vibration Motors
1. Keeb kwm ntawm LRA (linear resonant actuator)
Kev siv ERM vibration motors hauv cov khoom siv hluav taws xob tus kheej yog thawj zaug tsim los ntawm Motorola hauv xyoo 1984. BPR-2000 thiab OPTRX pagers yog cov khoom siv thawj zaug uas tau siv cov yam ntxwv no, muab cov lus ceeb toom hu xov tooj ntsiag to thiab cov lus teb me me rau tus neeg siv. Niaj hnub no, LRAs (tseem hu ua linear actuators) muab kev ntseeg siab siab hauv qhov loj me me. Lawv feem ntau siv rau hauv cov ntawv thov haptic feedback thiab cov haujlwm ceeb toom vibration yooj yim. Linear vibration motors yog siv dav hauv xov tooj ntawm tes, smartphones, cov khoom siv hnav thiab lwm yam khoom siv me me uas xav tau kev ua haujlwm vibration.
2. Tsav Tsheb IC
Lub cev muaj zog linear micro LD0832 & LD0825 yuav tsum siv nrog lub tsav IC xws li TI DRV2604L lossis DRV2605L. TI (Texas Instruments) muag lub rooj tsav xwm soj ntsuam nrog lub IC chip no rau nws. Mus saib qhov txuas: https://www.ti.com/lsds/ti/motor-drivers/motor-haptic-driver-products.page
Yog tias koj xav tau IC uas pheej yig dua, peb tuaj yeem pom zoo rau koj cov neeg muab khoom Suav nrog tib qho kev ua tau zoo tab sis tus nqi pheej yig.
3. Lub LRA Ua Ib Qho Cheebtsam ntawm Circuit Court
Thaum LRA motors raug koom ua ke rau hauv ib lub voj voog, lawv feem ntau yooj yim dua li lawv lub voj voog sib npaug, tshwj xeeb tshaj yog thaum tsav los ntawm lub chip tsav tsheb LRA tshwj xeeb xws li DRV2603. Los ntawm kev txuas LRA rau cov pins tsim nyog ntawm IC sawv ntsug, cov neeg tsim qauv thiab cov engineers tuaj yeem txuag lub sijhawm thiab tsom mus rau lwm yam ntawm lub kaw lus.
Txawm hais tias LRA tsim cov EMF rov qab los ntawm, ntau tus tsav tsheb LRA siv cov nyhuv no ua lub tshuab ntsuas. Qee tus tsav tsheb IC ntsuas EMF rov qab. Lawv siv cov ntaub ntawv no los kho qhov zaus ntawm lub teeb liab tsav tsheb kom pom qhov resonance. Nws ua rau cov khoom ua haujlwm hauv cov kev txwv thiab qib ze dua tsis hais txog cov xwm txheej lossis hnub nyoog.
Nws yog ib qho tseem ceeb uas yuav tsum nco ntsoov tias LRA lub cev muaj zog yog cov uas tsis muaj txhuam. Lawv tsis raug kev txom nyem los ntawm cov pa hluav taws xob uas cuam tshuam nrog commutator arcing hauv DC ERM lub cev muaj zog. Cov yam ntxwv no, zoo ib yam li cov cav tsis muaj txhuam ERM, feem ntau ua rau LRAs tsim nyog rau cov khoom siv ATEX tau ntawv pov thawj.
4. Tsav Tsheb Linear Resonant Actuators / Linear Vibrators
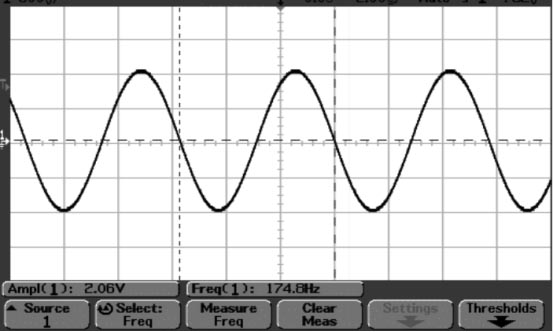
Cov vibrators linear LRA xav tau lub teeb liab AC kom ua haujlwm tau zoo, zoo ib yam li cov neeg hais lus. Nws yog qhov zoo tshaj plaws los siv lub teeb liab sine wave ntawm qhov zaus resonant, raws li pom hauv daim duab hauv qab no.
Tau kawg, qhov amplitude ntawm lub tsav waveform tuaj yeem hloov kho kom tsim cov teebmeem tactile feedback ntau dua.
5. Lub Neej Ntev Rau Cov Tshuab Vibrators
LRA vibration motors txawv ntawm feem ntau vibration motors uas lawv siv lub suab coil los tsav lub pawg, ua rau lawv tsis txhuam tau zoo.
Tus qauv tsim no txo qhov ua tau ntawm kev ua tsis tiav ntawm lub caij nplooj ntoos hlav, uas yog qauv siv kev tshuaj xyuas qhov kawg (FEA) thiab ua haujlwm hauv thaj chaw tsis qaug zog. Vim tias kev hnav khoom siv tsawg heev thiab hom kev ua tsis tiav tseem ceeb tsuas yog txwv rau kev laus ntawm cov khoom sab hauv, lub sijhawm nruab nrab kom ua tsis tiav (MTTF) ntev dua piv rau cov tshuab hluav taws xob brushed eccentric rotating mass (ERM) vibration.
Sab laj nrog koj tus thawj coj cov chaw tsim khoom siv linear motor
Peb pab koj zam qhov teeb meem kom xa tau qhov zoo thiab tus nqi uas koj lub micro LRA motors xav tau, raws sijhawm thiab raws li peev nyiaj.