

Officina motorum vibrantium SinarumintroducetMotor SMTetmotor linearistibi hodie.
Incipiamus quid sit motor telephonicus:
Motor telephoni mobilis plerumque ad applicationem vibrationis parvi telephoni mobilis refertur, cuius munus principale est effectum vibrationis telephoni mobilis creare;
Effectus vibrationis quasi indicium usori praebet dum telephonum mobile operatur. Vibratio telephonorum nostrorum, indicium bullarum nostrarum, omnia cum motoribus pertinent;
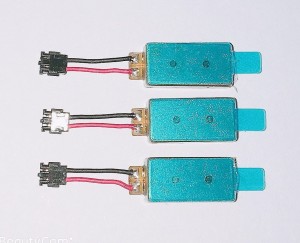
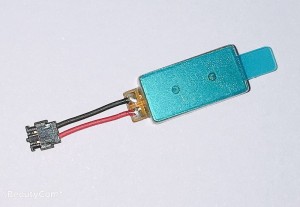
Incipiamus cum motore SMT.
Motor SMT, ut appellatur, similis est motori quem in curribus ludicris videmus. Sicut motores vulgares, inductionem electromagneticam, campum magneticum a currente electrico creatum, utuntur ad rotorem impellendum ut rotet et vibret.
Hodie, multae rationes telephonorum mobilium plerumque motorem SMT adhibent. Quamquam motor rotor processus fabricationis simplex et sumptus humilis habet, multas limitationes habet.
Lente incipiendo, lente frenando, exempli gratia, vibratione omnidirectionali, haec vitia usores in vibratione telephoni cellularis manifeste "tardam" sentire sinunt, et volumen rotoris motoris, praesertim crassitudo, difficile est moderari, et sola tendentia technologiae telephonorum mobilium magis magisque tenuis est. Etiam post emendationes, motores SMT adhuc difficile sunt dimensiones spatiales strictarum requisitarum in telephono satisfacere.
Motor SMT ex structura etiam dividitur in rotorem ordinarium et rotorem nummi; rotor ordinarius est: magnus volumen, sensus vibrationis pauper, responsio tarda, strepitus proprius.
Rotor nummorum magnorum: volumen parvum, sensus vibrationis pauper, responsio tarda, vibratio levis, sonitus humilis;
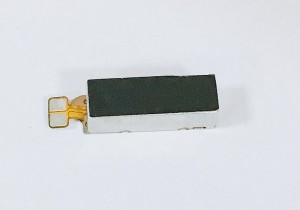
De motoribus linearibus loquamur.
Similis machinae perforatricis, motor linearis re vera est modulus machinae qui energiam electricam directe (nota: directe) in energiam mechanicam linearem convertit per massam elasticam quae modo lineari movetur.
Pro motoribus rotoricis, motores lineares plus constant.
In praesenti, motores lineares in duas species praecipue dividuntur: motores lineares transversales (axe XY) et motores lineares circulares (axe Z).
Motor linearis circularis paulo inferior est motori lineari transversali, qui optima ratio vibrationis hoc tempore est. Motores lineares circulares circiter quinque dollariis, motores lineares laterales inter octo et decem dollariis constant.
Si praefatio supra tibi non sufficit, ad tabernam experientiae telephonorum mobilium ire et telephona mobilia cum his motoribus respective experiri potes. Sunt enim differentiae inter praefationem theoreticam et experientiam practicam actualem, sed clare intellegere possumus motorem linearem esse optimum schema motoris hoc tempore.
Fortasse tibi placebit:



Tempus publicationis: XXX Augusti, MMXIX



