

Tuam Tshoj lub cev muaj zog vibration Hoobkasyuav qhia txogSMT lub cev muaj zogthiablub cev muaj zog linearrau koj hnub no.
Cia peb pib nrog lub cev muaj zog xov tooj:
Lub cev muaj zog ntawm lub xov tooj ntawm tes feem ntau yog hais txog daim ntawv thov ntawm kev co ntawm lub xov tooj ntawm tes me me, nws lub luag haujlwm tseem ceeb yog ua kom lub xov tooj ntawm tes co nyhuv;
Qhov kev co ua haujlwm ua cov lus teb rau tus neeg siv thaum lub sijhawm ua haujlwm ntawm lub xov tooj ntawm tes. Qhov kev co ntawm peb lub xov tooj, qhov kev tawm tsam ntawm peb cov nyees khawm, txhua yam muaj feem cuam tshuam nrog cov motors;
Cia peb pib nrog SMT lub cev muaj zog
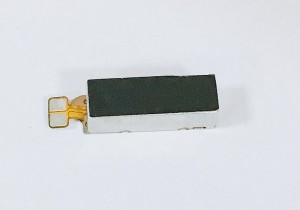
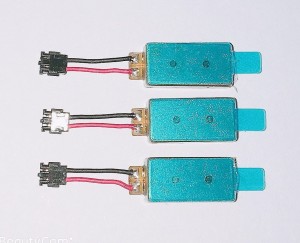
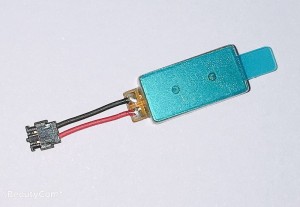
Lub cev muaj zog SMT, raws li nws hu ua, zoo ib yam li lub cev muaj zog uas peb pom hauv cov tsheb ua si. Ib yam li cov cev muaj zog ib txwm muaj, lawv siv lub zog hluav taws xob electromagnetic induction, lub teb sib nqus uas tsim los ntawm hluav taws xob tam sim no, los tsav lub rotor kom tig thiab co.
Niaj hnub no, ntau lub xov tooj ntawm tes feem ntau siv SMT lub cev muaj zog. Txawm hais tias lub cev muaj zog rotor muaj cov txheej txheem tsim khoom yooj yim thiab tus nqi qis, nws muaj ntau yam kev txwv.
Pib qeeb, qeeb nres, piv txwv li, kev co omnidirectional, cov teeb meem no yuav cia cov neeg siv hauv lub xov tooj ntawm tes kev co pom tseeb tias "qeeb", thiab qhov ntim ntawm lub cev muaj zog rotor, tshwj xeeb tshaj yog tuab yog qhov nyuaj rau tswj, thiab tsuas yog lub xov tooj ntawm tes thev naus laus zis sib txawv ntau dua thiab ntau dua, txawm tias tom qab kev txhim kho, SMT lub cev muaj zog tseem nyuaj rau ua kom tau raws li qhov chaw ntawm qhov yuav tsum tau ua ntawm lub xov tooj.
SMT lub cev muaj zog los ntawm cov qauv kuj tseem muab faib ua lub rotor ib txwm thiab lub npib rotor ib txwm: ntim loj, tsis muaj kev co, qeeb teb, nws tus kheej suab nrov.
Lub rotor loj-npib: me me, tsis muaj kev co, qeeb teb, me ntsis kev co, suab nrov tsawg;
Cia peb tham txog cov motors linear
Ib yam li lub tshuab tsav pawg, lub cev muaj zog linear yog lub cav module uas hloov lub zog hluav taws xob ncaj qha (ceeb toom: ncaj qha) mus rau hauv lub zog mechanical linear los ntawm lub caij nplooj ntoos hlav uas txav mus rau hauv txoj kev linear.
Rau cov rotor motors, linear motors kim dua.
Tam sim no, cov motors linear feem ntau muab faib ua ob hom: transverse linear motors (XY axis) thiab circular linear motors (Z axis).
Lub cev muaj zog linear voj voog qis dua me ntsis ntawm lub cev muaj zog linear transverse, uas yog qhov kev co zoo tshaj plaws tam sim no. Cov cev muaj zog linear voj voog raug nqi li $ 5 thiab cov cev muaj zog linear sab nraud ntawm $ 8 thiab $ 10.
Yog tias qhov kev qhia saum toj no tsis txaus rau koj, koj tuaj yeem mus rau lub khw muag khoom siv xov tooj ntawm tes thiab xav tias lub xov tooj ntawm tes nrog cov motors no. Tom qab tag nrho, muaj qhov sib txawv ntawm kev qhia theoretical thiab qhov kev paub tiag tiag, tab sis peb tuaj yeem nkag siab meej tias lub cev muaj zog linear yog qhov zoo tshaj plaws lub cev muaj zog tam sim no.
Tej zaum koj yuav nyiam:



Lub sijhawm tshaj tawm: Lub Yim Hli-30-2019



