Olùpèsè Mọ́tò LRA (Linear Resonant Actuator)
Ile-iṣẹ Leader MicroLRA vibrator ṣẹda gbigbọnàtiesi hapticní ìtọ́sọ́nà Z àti ìtọ́sọ́nà X. A gbà pé ó tayọ àwọn ERM ní àkókò ìdáhùn àti ìgbésí ayé, èyí tí ó mú kí ó dára fún ẹ̀rọ ìfìhàn fóònù àti ìmọ̀ ẹ̀rọ ìgbóná tí a lè wọ̀.
Mọ́tò ìgbìn LRA ń fúnni ní ìgbìn ìgbìn tí ó dúró ṣinṣin nígbàtí ó ń gba agbára díẹ̀, ó sì ń mú kí àwọn ìrírí haptic dára síi fún àwọn olùlò. Ó ń ṣe àṣeyọrí ìgbìn ìgbìn nípasẹ̀ agbára elektróònù àti ipò resonance, èyí tí àwọn ìgbìn tí ìgbì sine ti ṣe ń fà.
Gẹ́gẹ́ bí ògbóǹtarìgìmicrolaini olupese ati olupese ẹrọ ni Ilu ChinaA le pade awọn aini awọn alabara pẹlu mọto laini ti o ni didara giga ti aṣa. Ti o ba nifẹ si, a kaabọ lati kan si Leader Micro.
Ohun tí a ń ṣe
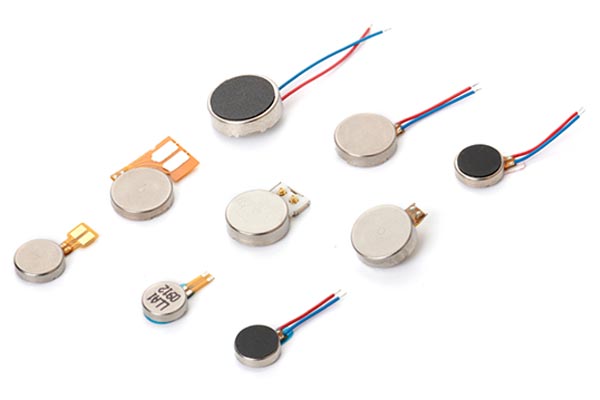
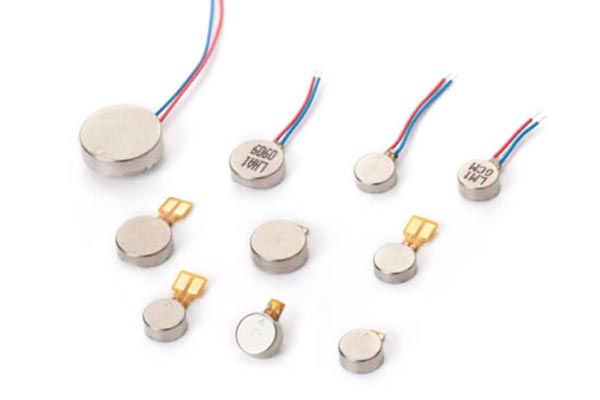
LRA (Olùṣiṣẹ́ Atunṣe Atunṣe Líníríà) mọ́tò jẹ́ mọ́tò ìgbìyànjú tí AC ń darí pẹ̀lú ìwọ̀n iwọ̀n8mm, èyí tí a sábà máa ń lò nínú àwọn ohun èlò ìfèsì haptic. Ní ìfiwéra pẹ̀lú àwọn mọ́tò ìgbìyànjú ìbílẹ̀, mọ́tò ìgbìyànjú LRA jẹ́ èyí tí ó ń lo agbára jù. Ó ń fúnni ní ìdáhùn tí ó péye pẹ̀lú àkókò ìbẹ̀rẹ̀/ìdúró kíákíá.
A ṣe apẹrẹ Linear Resonant Actuator (LRA) wa ti o ni apẹrẹ owo lati yipo ni apa Z, ni ila taara si oju moto naa. Gbigbọn Z-axis kan pato yii munadoko pupọ ni gbigbe gbigbọn sinu awọn ohun elo ti a le wọ. Ninu awọn ohun elo igbẹkẹle giga (Hi-Rel), moto LRA le jẹ yiyan ti o wulo si awọn moto gbigbọn ti ko ni brush nitori pe ẹya inu inu nikan ti o le wọ ati kuna ni orisun omi.
Ile-iṣẹ wa ti pinnu lati pese ohun elo actuator onirin ti o ga julọ pẹlu awọn alaye ti a le ṣe adani lati pade awọn aini oriṣiriṣi ti awọn alabara wa. Ṣe o nifẹ si awọn solusan ti o fẹẹrẹ ati ti o munadoko? Ṣawari bi a ṣe le ṣeawọn mọto ti ko ni ipilẹfi iyara ati konge ti o tayọ ranṣẹ!
Àwọn Ẹ̀rọ Ìgbìyànjú LRA ti Z-axis: Àwọn Ìdáhùn Ìfọwọ́kàn Tó Dára Jùlọ
TiwaÀwọn mọ́tò ìgbóná Z-axis(láti ọwọ́ LEADER) fi àwọn ìdáhùn haptic tó péye, tó sì ń dáhùn padà nínú àwọn ìtẹ̀sẹ̀ tó gbòòrò—ó dára fún àwọn ẹ̀rọ níbi tí àyè bá wà ní iye tó ga.
Ó wà ní onírúurú ìṣètò (fún àpẹẹrẹ,6mm × 2.5mm), awọn mọto gbigbọn wọnyi ṣe atilẹyin fun isọpọ ti o rọ (pẹluAwọn asopọ waya tabi FPCB) láti bá onírúurú àwọn àpẹẹrẹ ọjà mu (àwọn ohun tí a lè wọ̀ lọ́nà ọlọ́gbọ́n, àwọn ohun èlò kékeré, ẹ̀rọ itanna to ṣee gbe).
Àwòṣe kọ̀ọ̀kan ń ṣe ìwọ̀n ìdàgbàsókè kékeré pẹ̀lú iṣẹ́ ìgbọ̀nsẹ̀ tí ó ṣeé gbẹ́kẹ̀lé, èyí tí ó mú kí wọ́n jẹ́ àṣàyàn tí a lè yàn fún àwọn ẹ̀rọ kékeré tí ó ní ìbéèrè gíga.







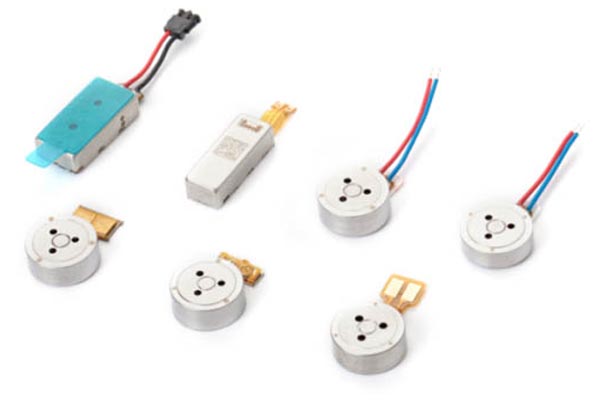
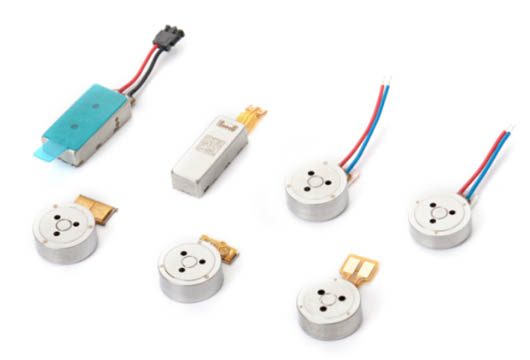
Àwọn Ẹ̀rọ Ìgbìyànjú X-axis: Àwọn Ìdáhùn Haptic Tín-ín-rín, Tí Ó Gíga
Àwọn ẹ̀rọ ìgbóná X-axis ti LEADER ń fi ránṣẹ́àwọn èsì ìfọwọ́kàn tí a fojúsùn, tí ó dúró ṣinṣin nínú ìrísí onígun mẹ́rin tí kò ní ìrísí púpọ̀—ó dára fún àwọn ẹ̀rọ tí ó nílò ìṣọ̀kan àwọn ohun èlò tí ó tẹ́jú, tí ó sì gbé àyè ga.
Ó wà nínu8×9mm (LD0809AA)àtiÀwọn ìwọ̀n 8×15mm (LD0815AA), àwọn mọ́tò ìgbì LRA wọ̀nyí ń mú ìgbì X-direction tí ó ṣeé gbẹ́kẹ̀lé jáde, èyí tí ó mú kí wọ́n dára fún àwọn ọjà tín-ín-rín bíiawọn fonutologbolori, àwọn tábìlì, àti àwọn ohun èlò onímọ̀ tín-ín-rín.
Apẹrẹ wọn tó rọrùn láti lò láìsí pé ó ní àbùkù sí ìhùwàsí wọn.


| Àwọn àwòṣe | Ìwọ̀n (mm) | Fọ́tíìlì tí a fún ní ìwọ̀n (V) | Ìwọ̀n Ìsinsìnyí Tí A Gbé Kalẹ̀ (mA) | Igbagbogbo | Fọ́ltéèjì | Ìyárasí |
| LD0825 | φ8*2.5mm | 1.8VrmsACÌgbì omi Sine | 85mA Púpọ̀ jùlọ | 235±5Hz | 0.1~1.9 Vrms AC | 0.6Grms Min |
| LD0832 | φ8*3.2mm | 1.8VrmsACÌgbì omi Sine | 80mA Púpọ̀ jùlọ | 235±5Hz | 0.1~1.9 Vrms AC | 1.2Grms Min |
| LD4512 | 4.0Wx12L 3.5Hmm | 1.8VrmsACÌgbì omi Sine | 100mA Púpọ̀ jùlọ | 235±10Hz | 0.1~1.85 Vrms AC | 0.30Grms Min |
| LD2024 | Dia 20mmx24T | Ìgbì Sine 1.2VmsAc | 200mA Púpọ̀ jùlọ | 65±10Hz | 0.1~1.2VrmsAC | 2.5±0.5G |
Ṣé o kò tíì rí ohun tí o ń wá? Pe àwọn olùdámọ̀ràn wa fún àwọn ọjà tó wà nílẹ̀.
Ohun elo
Àwọn ohun èlò ìṣiṣẹ́ onípele linear ní àwọn àǹfààní pàtàkì díẹ̀: ìgbésí ayé gíga gan-an, agbára gbígbìyànjú tí a lè ṣàtúnṣe, ìdáhùn kíákíá, ariwo kékeré. A ń lò ó fún àwọn ọjà ẹ̀rọ itanna tí ó nílò àbájáde haptic bíi fóònù alágbèéká, àwọn ohun èlò tí a lè wọ̀, àwọn agbekọrí VR àti àwọn kọ́ǹpútà eré, èyí tí ó ń mú kí àwọn ìrírí olùlò sunwọ̀n síi.
Àwọn fóònù alágbèéká
A sábà máa ń lo mọ́tò ìgbóná líínì nínú àwọn fóònù alágbéka fún ìfèsì haptic, bíi fífúnni ní ìdáhùn tactile fún ìtẹ̀wé àti títẹ̀ bọ́tìnnì. Àwọn olùlò lè nímọ̀lára ìdáhùn pípéye nípasẹ̀ ìka ọwọ́ wọn, èyí tí ó mú kí ìpéye ìtẹ̀wé gbogbogbò dára síi àti dín àwọn àṣìṣe ìtẹ̀wé kù. Ní àfikún, mọ́tò lra haptic lè pèsè ìkìlọ̀ ìgbóná fún ìfìhàn, ìpè àti ìkìlọ̀. Ó lè mú kí ìfaramọ́ gbogbo àwọn olùlò sunwọ̀n síi.

Àwọn ohun tí a lè wọ̀
A tun le ri gbigbọn moto laini ninu awọn ohun elo ti a fi n wọ, gẹgẹbi awọn smartwatches, awọn olutọpa amọdaju ati awọn ẹrọ miiran ti o le gbe. Awọn ohun elo ti n ṣiṣẹ laini le pese awọn itaniji gbigbọn fun awọn ipe ti nwọle, awọn ifiranṣẹ, awọn imeeli tabi awọn itaniji, eyiti o fun awọn olumulo laaye lati wa ni asopọ pẹlu agbaye laisi idilọwọ awọn iṣẹ ojoojumọ wọn. Ni afikun, moto laini kekere le pese esi haptic fun ipasẹ amọdaju, gẹgẹbi awọn igbesẹ titọpa, awọn kalori ati oṣuwọn ọkan.

Àwọn agbekọri VR
Àwọn mọ́tò onílà tí a ṣe àdáni tún lè rí nínú àwọn agbekọri VR, bíi Oculus Rift tàbí HTC Vive, fún ìfarahàn ìmọ̀lára. Mọ́tò onílà tí a ṣe àdáni lè fi onírúurú ìró tí ó lè ṣe àfarawé onírúurú ìmọ̀lára inú-eré, bíi ìbọn, ìlù tàbí ìbúgbàù. Mọ́tò lra ń fi ìwọ̀n mìíràn ti realism kún àwọn ìrírí virtual real.

Àwọn Kónsolù Àwọn Ere-idaraya
A tun lo mọto laini aṣa ninu awọn oludari ere fun esi haptic. Awọn mọto wọnyi le pese esi gbigbọn fun awọn iṣẹlẹ pataki ninu ere, gẹgẹbi awọn ikọlu aṣeyọri, awọn ijamba tabi awọn iṣe ere miiran. Wọn le fun awọn oṣere ni iriri ere ti o jinlẹ diẹ sii. Awọn gbigbọn wọnyi tun le pese awọn ami ti ara si awọn oṣere, gẹgẹbi kiko wọn nigbati ohun ija kan ba ṣetan lati yinbọn tabi tun gbe wọn soke.

Ní ṣókí, lílo àwọn mọ́tò ìgbìn actuator linear vibration wọ́pọ̀, láti fóònù alágbèéká sí àwọn kọ́ǹpútà eré, ó sì lè mú kí ìrírí àwọn olùlò sunwọ̀n síi ní onírúurú ìlò.
Báwo ni LRA Motors ṣe ń mú kí ìgbìyànjú gbilẹ̀
Àwọn ẹ̀rọ LRA tín-tín wa tí a fi ṣe àgbékalẹ̀ àti àwọn ìmọ̀ ẹ̀rọ tí a fọwọ́ sí ni a mú kí ó ṣeé ṣe — àwọn àtúnṣe tuntun tí ó ń mú kí ìṣẹ̀dá ìgbóná lágbára nínú ìrísí tí a ti dínkù gidigidi.
Báwo ni LRA Motors ṣe ń mú kí ìgbìyànjú gbilẹ̀
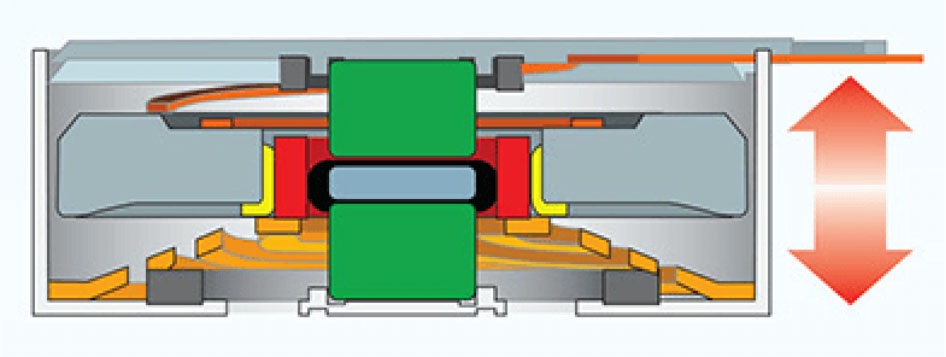
Nínú LRA kan, ohùn ìbòrí náà dúró ṣinṣin nígbà tí ó bá ń bá ibi-ìwọ̀n mágnẹ́ẹ̀tì tí ó ṣeé gbé kiri lò. Nígbà tí a bá ṣiṣẹ́, ìbòrí náà ń darí ìwọ̀n yìí láti máa yípo sókè àti sísàlẹ̀ sí àwọn orísun omi inú. Ìṣípo tí ó ń ṣe lẹ́ẹ̀kan náà yìí ń yí gbogbo ẹ̀rọ LRA kúrò, èyí sì ń mú kí àwọn olùlò nímọ̀lára ìgbóná.
Ìlànà yìí ní ìbáramu pẹ̀lú ìmọ̀ ẹ̀rọ agbọ́rọ̀sọ: bíi àwọn agbọ́rọ̀sọ (tí ó yí àwọn àmì AC padà sí ìyípadà afẹ́fẹ́ láti mú ohùn jáde), àwọn LRA ń túmọ̀ ìgbàlódé àti ìbúgbàù sí ìṣípopo ìgbìyànjú ara nípasẹ̀ ìwọ̀n magnetic tí ó yára yípo. Síbẹ̀síbẹ̀, láìdàbí àwọn agbọ́rọ̀sọ (tí ó ń ṣiṣẹ́ káàkiri àwọn ibi ìgbóhùnsáfẹ́fẹ́), àwọn mọ́tò LRA ni a ṣe àtúnṣe sí fún àwọn ibi ìgbóhùnsáfẹ́fẹ́ pàtó — èyí tí ó mú kí wọ́n dára fún àwọn ohun èlò ìfèsì haptic tí a fojúsùn.
Àwọn Ohun Èlò Amúṣiṣẹ́ Alágbèékán Onílànà
Àwọn Ẹ̀rọ Gbigbọn Líníì: Ìdáhùn Yára, Ìṣàkóso Pípé & Ìdánrawò Ọlọ́gbọ́n
Àwọn mọ́tò ìgbìn tí a fi ń tànmọ́lẹ̀ (LRAs) yàtọ̀ fún ìṣíṣẹ́ wọn tí ó yára gidigidi—tí ó sábà máa ń bẹ̀rẹ̀ láàárín 5 sí 10 milliseconds—ìyàtọ̀ pátápátá sí ìdáhùn díẹ̀díẹ̀ ti àwọn mọ́tò tí a fi ń yípo tí ó pọ̀ jù (ERM).
Ìṣiṣẹ́ kíákíá yìí wá láti inú ìṣíkiri ẹsẹ̀ ẹsẹ̀ ti mojuto oofa: nígbà tí iná bá ti ń ṣàn kọjá ohùn ohun ẹ̀rọ náà, ẹ̀yà oofa náà yóò máa ṣiṣẹ́ lẹ́sẹ̀kẹsẹ̀.
Ní ìfiwéra, àwọn mọ́tò ERM nílò àkókò láti dé iyàrá ìṣiṣẹ́ kí wọ́n tó ṣe ìgbónára tó péye; kódà nígbà tí a bá ń lo agbára jù fún ìyárayára kíákíá, àwọn ERM sábà máa ń nílò 20–50 milliseconds láti dé agbára ìgbónára tí a fẹ́.
Àwọn Àbùdá àti Iṣẹ́ LRA Motor
Àwọn Ànímọ́:
- Iṣẹ́ folti kekere:Mọ́tò LRA ní agbára fólẹ́ẹ̀tì kékeré pẹ̀lú 1.8v, èyí tí ó mú kí ó dára fún àwọn ẹ̀rọ itanna kéékèèké tí kò nílò agbára púpọ̀.
- Iwọn kekere:Ìwọ̀n kékeré ti mọ́tò LRA yìí jẹ́ kí a lè lò ó nínú àwọn ẹ̀rọ tí àyè wọn kò pọ̀.
- Akoko ibẹrẹ/iduro iyara: Mọ́tò LRA ní àkókò ìbẹ̀rẹ̀/ìdúró kíákíá, èyí tó mú kí ó lè fún olùlò ní ìdáhùn tó péye síi.
- Iṣẹ́ ariwo kékeré:Àwọn mọ́tò wọ̀nyí máa ń ṣiṣẹ́ láìsí ariwo, èyí sì ṣe pàtàkì fún àwọn ẹ̀rọ tí kò nílò ariwo púpọ̀.
- Awọn eto igbohunsafẹfẹ ati titobi ti a le ṣe adani:A le ṣe àtúnṣe àwọn ètò ìgbóhùnsáfẹ́fẹ́ àti ìbúgbà ti mọ́tò LRA láti bá àwọn ohun èlò pàtó mu.
Àwọn iṣẹ́:
- LRA motor n pese esi haptic ti o peye ati ti o munadoko lati mu iriri olumulo pọ si pẹlu ẹrọ naa.
-Ìmọ̀lára ìfọwọ́kàn tí mọ́tò LRA ń pèsè tí ó ń mú kí ìrírí olùlò pẹ̀lú ẹ̀rọ náà sunwọ̀n síi, tí ó sì ń mú kí ó dùn mọ́ni láti lò.
- Àwọn mọ́tò LRA kò lo agbára púpọ̀, èyí tó mú kí wọ́n dára fún àwọn ẹ̀rọ tí a ṣe láti fi agbára pamọ́.
- Àwọn mọ́tò LRA ń pese ìdáhùn ìgbóná tí ó dájú tí ó sì dúró ṣinṣin ju àwọn mọ́tò ìgbóná ìbílẹ̀ lọ.
- A le ṣatunṣe awọn eto igbohunsafẹfẹ ati titobi ti mọto LRA lati ba awọn ilana ẹrọ oriṣiriṣi mu.
Awọn idojukọ apẹrẹ pataki fun awọn LRA pẹlu:
Ìwádìí ìmọ̀ ẹ̀rọ ìgbà ìrúwé àti ìṣàyẹ̀wò wahala (láti ṣe àtúnṣe ìyípadà àti agbára ìdúróṣinṣin)
Iṣapeye aaye itanna ati magnetic (fun iṣelọpọ agbara to munadoko)
Iṣakoso agbara gbigbọn (lati rii daju pe iṣẹ ṣiṣe deede ati igbesi aye gigun)
Ohun pàtàkì kan tí a gbé yẹ̀wò fún àwọn LRA ni àkókò ìdádúró wọn: nítorí agbára ìṣiṣẹ́ tí a tọ́jú sínú àwọn orísun omi inú nígbà tí a ń ṣiṣẹ́, wọ́n lè gba tó300 millisecondsláti dákẹ́ jẹ́ẹ́ fúnra wọn. Síbẹ̀síbẹ̀, èyí lè yanjú pẹ̀lú bírékì tí ń ṣiṣẹ́: nípa yíyí ìpele àmì AC tí a pèsè sí actuator padà nípasẹ̀180 iwọn, a ń ṣẹ̀dá agbára ìdènà láti dènà ìyípadà omi orísun náà—tí ó ń dá ìgbọ̀nsẹ̀ dúró ní ìwọ̀nba10 millisecondsfún ìṣàkóso tó péye, lórí ìbéèrè.
Olùṣiṣẹ́ Atunṣe ...
Láìdàbí àwọn àwòrán ìbílẹ̀ tí ó ń gbé agbára ohùn-coil sí ojú ilẹ̀ ní tààrà, actuator resonant wa (LRA) dín agbára lílo nípa lílo ìpele resonant ti ètò ìsun omi inú rẹ̀. Nígbà tí ohùn coil bá ń darí agbára magnetic láti yípo ní ìpele resonant adayeba ti spring, ẹ̀rọ náà ń mú kí ìpele vibration pọ̀ sí i lọ́nà tí ó dára jù—ó ń fi ìdáhùn ìfọwọ́kàn tí ó lágbára sí i pẹ̀lú agbára díẹ̀.
LRA yìí, tí a fi AC ṣe, ń jẹ́ kí o lè ṣàtúnṣe ìgbóná àti ìgbóná láti mú kí ìrírí ìfọwọ́kàn náà sunwọ̀n síi. Ìyípadà yìí mú kí ó yàtọ̀ sí àwọn mọ́tò ERM, níbi tí ìgbóná àti ìgbóná ti sopọ̀ mọ́ ara wọn (yíyípadà ọ̀kan ń yí èkejì padà láìfọwọ́sí).
Ohun elo fifipamọ agbara gidi-Agbaye: Awọn ohun elo ti a wọ ọlọgbọn
Fún àwọn agogo onígbà díẹ̀ tí a fi bátìrì ṣe (tí ó gbára lé àwọn èròjà kékeré tí agbára wọn kò pọ̀), apẹ̀rẹ̀ ìró LRA wa dín agbára tí ó ní í ṣe pẹ̀lú ìgbọ̀nsẹ̀ kù.30%+ ní ìfiwéra pẹ̀lú àwọn ERM ìbílẹ̀. Fún àpẹẹrẹ: olùtọ́pasẹ̀ ìlera tí ó ń lo LRA yìí lè máa ṣe àtúnṣe “ìfitónilétí ìfitónilétí” nígbà tí ó ń fa ìgbésí ayé bátírì ojoojúmọ́ sí i nípaWákàtí 1.5—igbesoke pataki fun awọn ẹrọ nibiti gbogbo mAh ṣe pataki.
Nínú àwọn olùdarí ìbòjú àtẹ́wọ́ (tí a ń lò nínú àwọn pánẹ́lì ilé iṣẹ́), ìṣàkóso ìpele/ìwọ̀n agbára tí ó dúró ṣinṣin ti LRA tún ń dín ìfọ́ agbára tí kò pọndandan kù: ó ń fúnni ní ìdáhùn "click" tàbí "haptic texture" tí ó péye nígbà tí a bá mú un ṣiṣẹ́ nìkan, dípò kí ó máa ṣiṣẹ́ ní ìjáde tí a ti ṣe àtúnṣe (tí ó sì sábà máa ń lágbára jù) bíi ERMs.
Àwọn Àǹfààní Pàtàkì ti LRA Vibration Motors
Ìdáhùn Kíákíá Púpọ̀ bẹ̀rẹ̀o kan 5–10ms (yiyara ju awọn ẹrọ ERM lọ), láti mú kí ìdáhùn haptic lẹ́sẹ̀kẹsẹ̀, tó péye fún àwọn ìbáṣepọ̀ tó ní ìfarabalẹ̀ àkókò (fún àpẹẹrẹ, àwọn ìfọwọ́sowọ́pọ̀ àfọwọ́kọ, àwọn ìkìlọ̀ ìfitónilétí).
Lilo Agbara Lo resonance orisun omi lati mu iwọn gbigbọn pọ si pẹlu fifa agbara ti o kere ju - dinku lilo agbara nipasẹ30%+ vs.. awọn ẹ̀rọ ìbílẹ̀, tí ó ń mú kí batiri pẹ́ fún àwọn ẹ̀rọ tí a lè gbé kiri (àwọn ohun tí a lè wọ̀, àwọn fóònù alágbèéká).
Iṣakoso Ominira ti Awọn Pilamenti Gba laaye lati ṣatunṣe igbohunsafẹfẹ gbigbọn lọtọ ati titobi,n ṣe atilẹyin fun awọn iriri ifọwọkan ti a le ṣe adani (fún àpẹẹrẹ, àwọn ìdáhùn "tẹ" yàtọ̀ sí "buzz" pàtó) tí àwọn mọ́tò ERM kò lè bá mu.
Apẹrẹ Iwapọ & Irẹẹrẹ Awọn ifosiwewe fọọmu ti o fẹẹrẹ, ti o fi aaye pamọ (fún àpẹẹrẹ, àwọn ìwọ̀n ìbú/ìwúwo kékeré) wọ inu awọn ọja ti ko ni wahala (awọn smartwatches, àwọn agbetí) láìsí ìrúbọ iṣẹ́.
Ìdádúró Active Braking Pàtàkì Le dá gbigbọn dúró ní ~10ms(nípasẹ̀180°Ìyípadà ìpele àmì AC), yíyọ ìró ohùn tí ó dúró ṣinṣin kúrò àti rírí dájú pé a ti dín ìró ìdáhùn tí ó péye kù lórí ìbéèrè.
Àwọn Ìwé-ẹ̀rí Tó Jọmọ́ Ìdáhùn Líníá
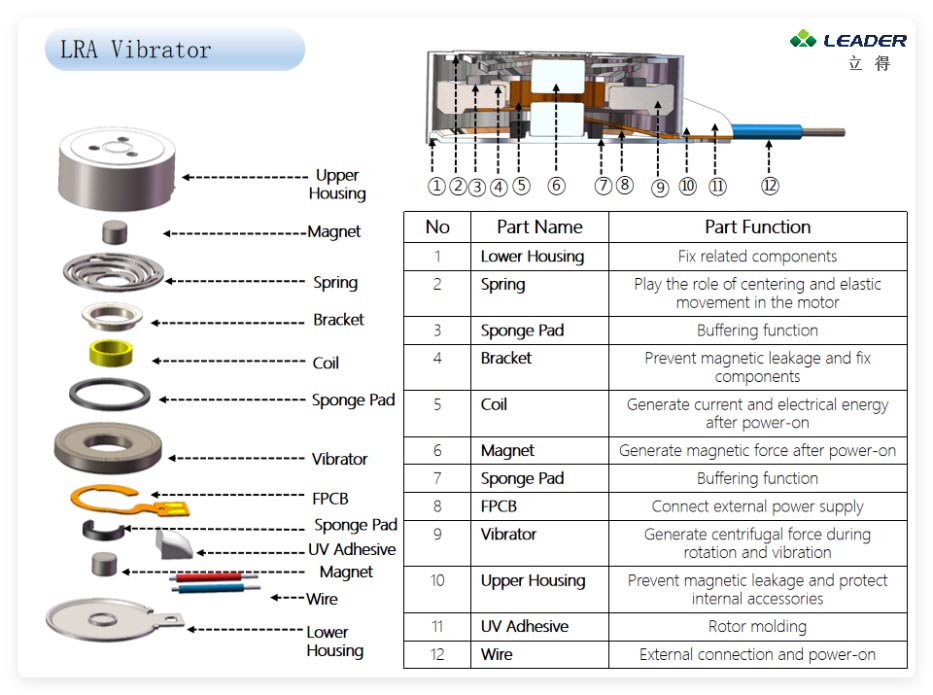
Ilé-iṣẹ́ wa ti gba ọ̀pọ̀lọpọ̀ ìwé-ẹ̀rí àṣẹ-àṣẹ tó ní í ṣe pẹ̀lú ìmọ̀-ẹ̀rọ mọ́tò LRA (Linear Resonant Actuator) wa, èyí tó ṣe àfihàn àwọn ìsapá ìṣẹ̀dá àti ìwádìí wa tó gbajúmọ̀ jùlọ ní ilé-iṣẹ́ náà. Àwọn ìwé-ẹ̀rí wọ̀nyí bo oríṣiríṣi apá ti ìmọ̀-ẹ̀rọ actuator gbigbọn, títí kan àwòrán rẹ̀, ìlànà ìṣelọ́pọ́ àti ìlò rẹ̀. Àwọn ìmọ̀-ẹ̀rọ àṣẹ-àṣẹ wa jẹ́ kí a lè pèsè àwọn mọ́tò LRA tó dára, tó ń lo agbára àti tó ṣeé ṣe tí ó lè bójútó àìní àwọn oníbàárà wa.
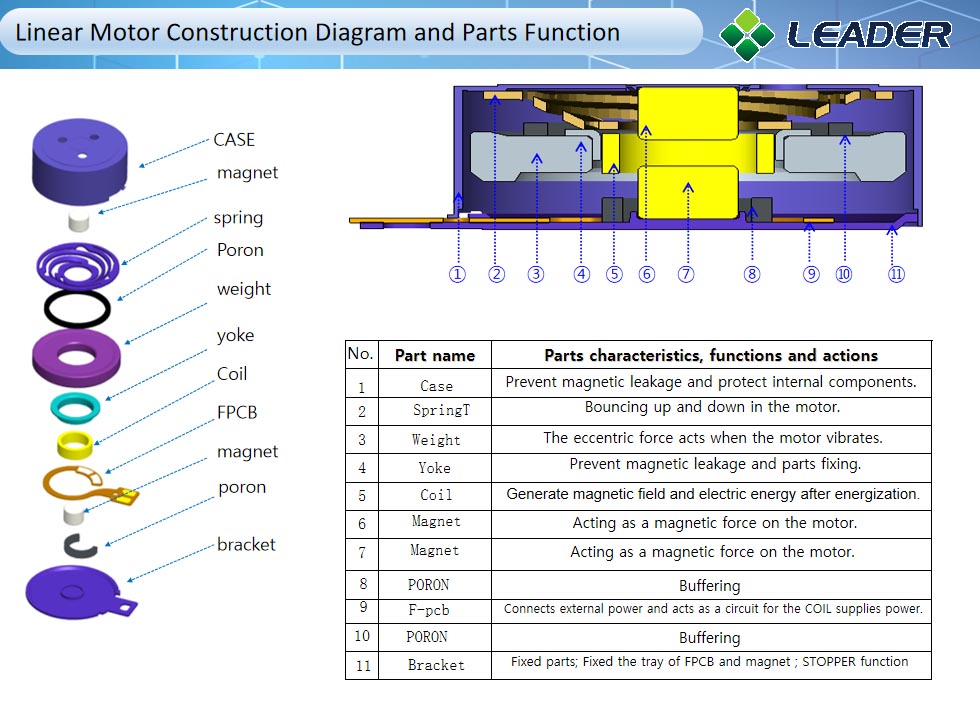
Ọ̀kan lára àwọn ìwé àṣẹ náà dá lórí àpẹẹrẹ mọ́tò ìgbóná tí ó ní ìpele gíga. A fi mọ́tò ìgbóná tí ó ní ìpele gíga sí apá kejì ẹ̀gbẹ́ ìsopọ̀ mọ́tò àti àkójọpọ̀ mọ́tò náà. Páàdì ìgbóná náà lè yẹra fún ìkọlù líle pẹ̀lú ilé náà nígbà tí àkójọ mọ́tò náà bá mì nínú ilé náà, èyí tí ó ń mú kí iṣẹ́ mọ́tò ìgbóná tí ó ní ìpele gígùn pẹ́. A gbé ìlù mànàmáná sí òde coil náà láti mú kí ìtóbi mọ́tò ìgbóná tí ó ní ìpele gíga pọ̀ sí i. Ó tún lè mú kí ìrírí haptic dára síi nígbà tí a bá ń lo àwọn ẹ̀rọ itanna tí a fi mọ́tò ìgbóná tí ó ní ìpele gíga sí i.
Ni gbogbogbo, imọ-ẹrọ LRA ti a fun ni aṣẹ wa ya wa si awọn oṣere ile-iṣẹ miiran, ti o fun wa laaye lati pese awọn ọja didara giga, tuntun ati ti o munadoko agbara fun awọn alabara wa. A duro ṣinṣin lati mu imotuntun imọ-ẹrọ wa, ati pese awọn solusan tuntun lati mu iriri olumulo ninu awọn ẹrọ itanna pọ si.
Gba Micro LRA Motors ni Pupọ ni Igbese-nipasẹ-igbesẹ
Awọn ibeere loorekoore nipa mọto Haptic Linear
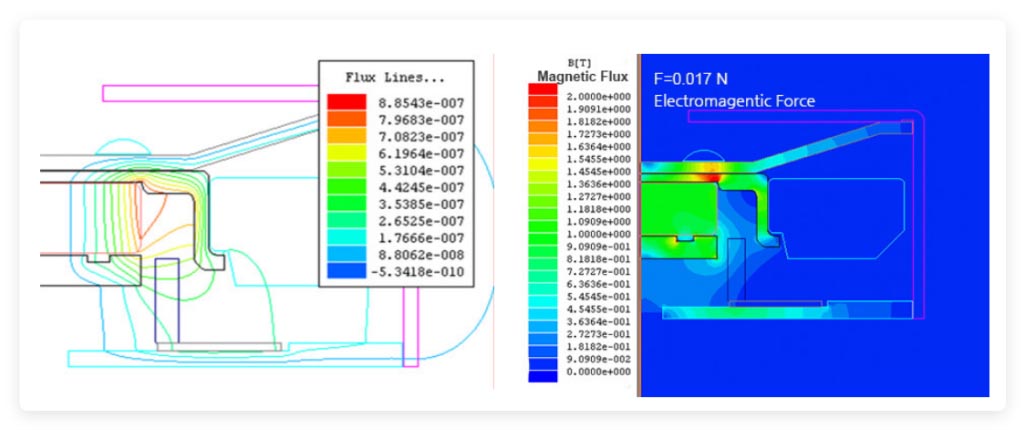
Ní ìyàtọ̀ síàwọn mọ́tò ìgbóná, èyí tí ó sábà máa ń lo ìyípadà electromechanical,Àwọn mọ́tò ìgbìgbò LRA (olùṣiṣẹ́ ìró ohùn onílànà)lo ohun èlò ìfọhùn láti wakọ ibi-ìṣẹ́ kan, tí ó ń ṣiṣẹ́ ní ọ̀nà tí kò ní brush. Apẹẹrẹ yìí dín ewu ìkùnà kù nítorí pé apá kan ṣoṣo tí ó lè yí padà ni orísun omi. Àwọn orísun omi wọ̀nyí ń ṣe àgbéyẹ̀wò àwọn ohun èlò tí ó ní opin (FEA) tí ó péye, wọ́n sì ń ṣiṣẹ́ láàrín ìwọ̀n àìlera wọn. Àwọn ọ̀nà ìkùnà jẹ́ ní pàtàkì pẹ̀lú ọjọ́ ogbó àwọn ohun èlò inú nítorí ìdínkù ìbàjẹ́ ẹ̀rọ.
(Ìwádìí àwọn ohun tó ní ìpíndọ́gba (FEA) ni lílo àwọn ìṣirò, àwọn àwòṣe àti àwọn àwòṣe láti sọ àsọtẹ́lẹ̀ àti láti lóye bí ohun kan ṣe lè hùwà lábẹ́ onírúurú ipò ara.)
Nítorí náà, àwọn mọ́tò ìgbìn LRA ní àkókò tó gùn sí ìkùnà (MTTF) ju àwọn ẹ̀rọ ìgbìn ìgbìn tí a fi ìgbóná ṣe tí a fi ìgbóná ṣe (ERM) ti ìbílẹ̀ lọ.
LRA Motors sábà máa ń ní ẹ̀mí gígùn ju àwọn mọ́tò mìíràn lọ.Igbesi aye labẹ ipo ti awọn aaya 2 lori / iṣẹju-aaya 1 pipa jẹ awọn iyipo miliọnu kan.
Ohun èlò ìṣiṣẹ́ ìgbóná tí ó wà ní ìlà bá onírúurú ẹ̀rọ itanna mu, bí àwọn ohun èlò ìtọ́jú, àwọn ẹ̀rọ ìṣègùn, àti àwọn ohun èlò ìdarí eré.
Bẹ́ẹ̀ni, a nílò awakọ̀ mọ́tò láti ṣiṣẹ́ àwọn mọ́tò ìgbìn tí ó wà ní ìlà. Awakọ̀ mọ́tò náà tún lè ṣe ìrànlọ́wọ́ láti ṣàkóso agbára ìgbìn náà àti láti dáàbò bo mọ́tò náà kúrò lọ́wọ́ ìwúwo púpọ̀.
Ìtàn àwọn actuator resonant (LRA) ni a lè tọ́ka sí lílo àwọn actuator resonant resonant (ERM) vibrations nínú àwọn ẹ̀rọ itanna ti ara ẹni. Motorola kọ́kọ́ ṣe àgbékalẹ̀ àwọn actuator vibrations ní ọdún 1984 nínú àwọn actuators BPR-2000 àti OPTRX rẹ̀. Àwọn actuator wọ̀nyí ń pèsè ọ̀nà ìdákẹ́jẹ́ láti kìlọ̀ fún olùlò nípasẹ̀ ìgbóná. Bí àkókò ti ń lọ, àìní fún àwọn ojutu ìgbóná tí ó ṣeé gbẹ́kẹ̀lé àti kékeré mú kí àwọn actuator resonant linear ní ìdàgbàsókè. Tí a tún mọ̀ sí àwọn actuator linear, àwọn LRA jẹ́ èyí tí ó ṣeé gbẹ́kẹ̀lé jù àti pé ó sábà máa ń kéré ju àwọn actuator ERM ìbílẹ̀ lọ. Wọ́n yára di gbajúmọ̀ nínú àwọn ohun èlò ìdáhùn haptic àti àwọn ìkìlọ̀ ìgbóná ìpìlẹ̀. Lóde òní, a ń lo LRA ní onírúurú ẹ̀rọ itanna bíi fóònù alágbèéká, àwọn fóònù alágbèéká, àwọn ẹ̀rọ tí a lè wọ̀, àti àwọn ẹ̀rọ kékeré mìíràn tí ó nílò iṣẹ́ ìgbóná ìgbóná. Ìwọ̀n kékeré àti ìgbẹ́kẹ̀lé wọn mú kí wọ́n dára fún pípèsè àbájáde láti mú kí ìrírí olùlò sunwọ̀n síi. Ní gbogbogbòò, ìyípadà láti àwọn actuator ERM sí àwọn actuator electronique ti yí ọ̀nà tí àwọn ẹ̀rọ fi ń pèsè àbájáde sí àwọn olùlò padà, ó sì ń pèsè ìrírí ìgbóná tí ó dára jù àti tí ó munadoko.
Láìdàbí àwọn mọ́tò ìgbìn DC tí a ti gbóná, àwọn actuator resonant (LRA) nílò àmì AC ní ìgbóná resonant láti ṣiṣẹ́ dáadáa. A kò le wakọ̀ wọn taara láti orísun folti DC. Àwọn ìtọ́sọ́nà LRA sábà máa ń wá ní oríṣiríṣi àwọ̀ (pupa tàbí búlúù), ṣùgbọ́n wọn kò ní polarity. Nítorí pé àmì ìwakọ̀ náà jẹ́ AC, kìí ṣe DC.
Ní ìyàtọ̀ sí àwọn ẹ̀rọ ìgbìn tí a fi ń yípo tí ó ń yípo tí ó ń yípo tí ó ń yípo (ERM), ṣíṣàtúnṣe ìwọ̀n fóltéèjì ìwakọ̀ nínú LRA nìkan ló ń nípa lórí agbára tí a lò (tí a wọ̀n ní agbára G) ṣùgbọ́n kì í ṣe ìwọ̀n ìgbìn tí ó ń yípo. Nítorí ìwọ̀n ìgbìn tí ó dín àti ìdíwọ̀n dídára rẹ̀, lílo àwọn ìgbìn tí ó wà lókè tàbí ní ìsàlẹ̀ ìwọ̀n ìgbìn tí ó ń yípo LRA yóò yọrí sí ìdínkù ìwọ̀n ìgbìn tí ó ń yípo, tàbí kí ó má ṣe sí ìgbìn rárá tí ó bá yà kúrò nínú ìwọ̀n ìgbìn tí ó ń yípo. Lóòótọ́, a ń pèsè àwọn LRA àti LRA tí ń ṣiṣẹ́ ní ọ̀pọ̀lọpọ̀ ìwọ̀n ìgbìn tí ó ń yípo.
Tí o bá ní àwọn ìbéèrè pàtó kan tàbí ìbéèrè síwájú sí i, jọ̀wọ́ jẹ́ kí a mọ̀, a ó sì fi ayọ̀ ràn ọ́ lọ́wọ́.
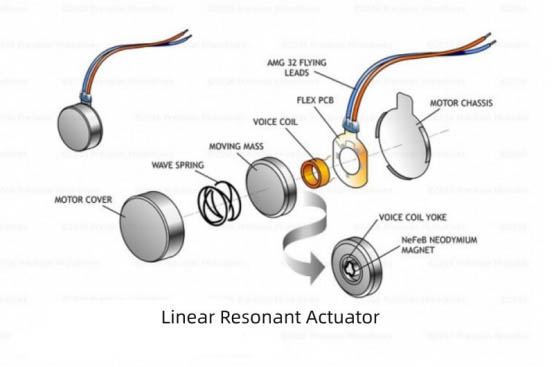
RA (Linear Resonant Actuator) jẹ́ actuator tí ó ń mú ìgbìyànjú jáde. A sábà máa ń lò ó nínú àwọn ẹ̀rọ bíi fóònù alágbèéká àti àwọn olùdarí eré láti fúnni ní ìdáhùn ìfọwọ́kàn. LRA ń ṣiṣẹ́ lórí ìlànà resonance.
Ó ní àwọn coils àti magnets. Nígbà tí alternating current bá kọjá nínú coil náà, ó ń ṣẹ̀dá magnetic field tí ó ń bá magnets náà lò. Ìbáṣepọ̀ yìí ń mú kí magnets náà máa rìn padà sẹ́yìn àti síwájú kíákíá.
A ṣe apẹrẹ LRA ni ọna ti o fi de iwọn igbohunsafẹfẹ adayeba rẹ lakoko gbigbe yii. Resonance yii mu awọn gbigbọn pọ si, ti o jẹ ki wọn rọrun fun awọn olumulo lati ṣe idanimọ ati rii. Nipa ṣiṣakoso igbohunsafẹfẹ ati kikankikan ti agbara ina alternating current ti o kọja nipasẹ coil, ẹrọ naa le ṣe awọn ipele ati awọn ilana gbigbọn oriṣiriṣi.
Èyí gba onírúurú ipa ìfàsẹ́yìn haptic láàyè, bíi ìfìhàn ìfitónilétí, ìfàsẹ́yìn ìfọwọ́kàn, tàbí ìrírí eré onígbàlódé. Ní gbogbogbòò, àwọn LRA ń lo agbára itanna àti ìlànà ìfàsẹ́yìn láti ṣe ìfìhàn tí ó ń mú ìṣípo tí a ṣàkóso àti tí a lè rí jáde.
O nilo lati pese awọn alaye ipilẹ ti mọto naa, gẹgẹbi: Iwọn, Awọn ohun elo, Fọtita, Iyara. O dara lati fun wa ni awọn aworan apẹẹrẹ ohun elo ti o ba ṣeeṣe.
Àwọn ọkọ̀ ayọ́kẹ́lẹ́ kékeré DC wa ń rí àwọn ohun èlò ní onírúurú iṣẹ́ bíi àwọn ohun èlò ilé, ohun èlò ọ́fíìsì, ìtọ́jú ìlera, àwọn nǹkan ìṣeré tó gbajúmọ̀, àwọn ètò ilé ìfowópamọ́, àwọn ètò ìdánilẹ́kọ̀ọ́, ẹ̀rọ tí a lè wọ̀, ohun èlò ìsanwó, àti àwọn ìdènà ilẹ̀kùn iná mànàmáná. A ṣe àwọn ọkọ̀ ayọ́kẹ́lẹ́ wọ̀nyí láti pèsè iṣẹ́ tó ṣeé gbẹ́kẹ̀lé àti tó gbéṣẹ́ nínú àwọn ohun èlò onírúurú wọ̀nyí.
Iwọn opin6mm~12mm Dc Micro Motor, Mọ́tò iná mànàmáná, Fọra Dc Motor,Mọ́tò Dc Láìfọ́, Mọ́tò kékeré,Mọ́tò onílà, Mọ́tò LRA,Silinda coreless Gbigbọn Motor, smt motor àti bẹ́ẹ̀ bẹ́ẹ̀ lọ
Mọ diẹ sii nipa LRA Linear Vibration Motors
1. Ìtàn LRA (olùṣiṣẹ́ ohun amúṣiṣẹ́ onípele linear)
Lílo àwọn mọ́tò ìgbìn ERM nínú àwọn ẹ̀rọ itanna ara ẹni ni Motorola kọ́kọ́ ṣe ní ọdún 1984. Àwọn ẹ̀rọ BPR-2000 àti OPTRX jẹ́ ọ̀kan lára àwọn ẹ̀rọ àkọ́kọ́ tí ó fi ẹ̀yà ara yìí kún un, tí ó ń fún olùlò ní ìkìlọ̀ ìpè ìdákẹ́jẹ́ẹ́ àti ìdáhùn ìgbìn tí ó pọ̀. Lónìí, àwọn LRA (tí a tún mọ̀ sí àwọn actuators linear) ń fúnni ní ìgbẹ́kẹ̀lé gíga ní àwọn ìwọ̀n kékeré. Wọ́n sábà máa ń lò wọ́n nínú àwọn ohun èlò ìdáhùn haptic àti àwọn iṣẹ́ ìkìlọ̀ ìgbìn tí ó jẹ́ ìpìlẹ̀. Àwọn mọ́tò ìgbìn tí ó jẹ́ linear ni a ń lò ní àwọn fóònù alágbéká, àwọn fóònù alágbéká, àwọn ẹ̀rọ tí a lè wọ̀ àti àwọn ẹ̀rọ kékeré mìíràn tí ó nílò iṣẹ́ ìgbìn.
2. IC awakọ
Ó yẹ kí a lo mọ́tò onípele LD0832 àti LD0825 pẹ̀lú ẹ̀rọ ìwakọ̀ IC bíi TI DRV2604L tàbí DRV2605L. TI (Texas Instruments) ń ta pátákó ìṣàyẹ̀wò pẹ̀lú ẹ̀rọ IC yìí. Ṣàyẹ̀wò ìjápọ̀ náà: https://www.ti.com/lsds/ti/motor-drivers/motor-haptic-driver-products.page
Tí o bá fẹ́ IC tó rọ̀ mọ́ owó jù, a lè dámọ̀ràn rẹ fún àwọn olùtajà ará China tí wọ́n ní iṣẹ́ kan náà ṣùgbọ́n tí wọ́n ní owó pọ́ọ́kú.
3. LRA Gẹ́gẹ́ bí Ẹ̀yà Ayíká
Nígbà tí a bá so àwọn mọ́tò LRA pọ̀ mọ́ àyíká kan, wọ́n sábà máa ń rọrùn ju àyíká tí ó dọ́gba wọn lọ, pàápàá jùlọ nígbà tí a bá fi ẹ̀rọ ìwakọ̀ LRA tí a yà sọ́tọ̀ bíi DRV2603 ṣe ìwakọ̀ rẹ̀. Nípa síso LRA pọ̀ mọ́ àwọn pinni tí ó yẹ ti IC tí ó dúró ṣinṣin, àwọn ayàwòrán àti àwọn onímọ̀ ẹ̀rọ lè fi àkókò pamọ́ kí wọ́n sì dojúkọ àwọn apá mìíràn ti ètò náà.
Láìka ìṣẹ̀dá EMF ẹ̀yìn láti ọwọ́ LRAs sí, ọ̀pọ̀ àwọn awakọ̀ LRA ló ń lo ipa yìí gẹ́gẹ́ bí ẹ̀rọ ìmòye. Àwọn awakọ̀ IC kan ń wọn EMF ẹ̀yìn. Wọ́n ń lo ìwífún yìí láti ṣàtúnṣe ìgbóhùnsáfẹ́fẹ́ àmì ìwakọ̀ láti rí ìró ohùn. Ó ń jẹ́ kí ọjà náà ṣiṣẹ́ láàárín ààlà àti ìpele tó sún mọ́ ọn láìka ipò tàbí ọjọ́ orí sí.
Ó ṣe pàtàkì láti kíyèsí pé àwọn mọ́tò LRA kò ní brush dáadáa. Wọn kì í ní ìṣòro láti inú àwọn ìtújáde oníná tí ó ní í ṣe pẹ̀lú ìfàsẹ́yìn commutator nínú mọ́tò DC ERM. Ànímọ́ yìí, tí ó jọ mọ́tò ERM tí kò ní brush, sábà máa ń mú kí LRA dára fún àwọn ohun èlò tí ATEX fọwọ́ sí.
4. Awọn olupilẹṣẹ ohun ti n ṣe atunṣe laini / awọn olupilẹṣẹ ohun ti n ṣe awakọ
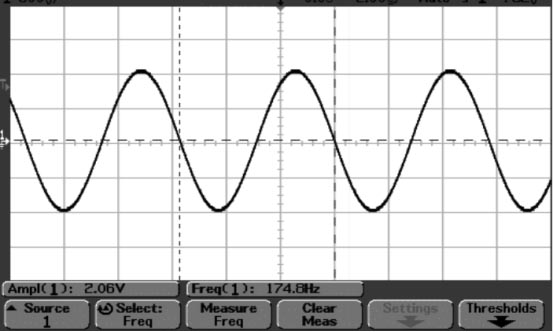
Àwọn ohun èlò ìlù LRA linear vibrators nílò àmì AC láti ṣiṣẹ́, tí ó jọ àwọn agbọ́hùnsọ. Ó dára láti lo àmì ìgbì sine ní ìpele resonant, gẹ́gẹ́ bí a ṣe fihàn nínú àwòrán ní ìsàlẹ̀.
Dajudaju, titobi ti igbi awakọ naa le ṣee ṣe lati ṣe agbejade awọn ipa esi ifọwọkan ti ilọsiwaju diẹ sii.
5.Ìgbésí ayé fún àwọn onírin onílànà
Àwọn mọ́tò ìgbì LRA yàtọ̀ sí ọ̀pọ̀lọpọ̀ mọ́tò ìgbì nítorí pé wọ́n ń lo ìbòrí ohùn láti wakọ̀ ibi tí ó pọ̀ sí i, èyí sì mú kí wọ́n má ṣe jẹ́ kí ó gbóná.
Apẹẹrẹ yii dinku iṣeeṣe ikuna orisun omi, eyiti a ṣe apẹẹrẹ nipa lilo itupalẹ element finite (FEA) ati ṣiṣẹ ni agbegbe ti ko ni rirẹ. Nitori pe ibajẹ ẹrọ kere ati pe ipo ikuna akọkọ ni opin si ogbologbo ti awọn paati inu, akoko apapọ si ikuna (MTTF) gun pupọ ni akawe pẹlu awọn mọto gbigbọn ti a ṣe ni eccentric rotating mass (ERM) ti aṣa.
Kan si Awọn olupese Amọdaju Onirin rẹ
A n ran ọ lọwọ lati yago fun awọn ijamba lati pese didara ati iye ti awọn ẹrọ kekere LRA rẹ nilo, ni akoko ati ni isunawo.