

De laatste jaren ligt de focus bij vlaggenschiptelefoons meer op de fysieke ervaring dan op de scorestandaard. Neem bijvoorbeeld de beterelineaire motor, Bijvoorbeeld.
Vandaag de dag zijn er drie vlaggenschiptelefoons met een lineaire motor: de OnePlus 7 Pro, de Meizu 16s en de OPPO Reno 10x Zoom.
We gaan de lineaire motor analyseren en onderzoeken waarom het vlaggenschip onder de lineaire motoren de koning genoemd mag worden.
Dezelfde motor is heel anders.
Allereerst is het belangrijk om het verschil tussen lineaire motoren en gewone rotormotoren uit te leggen.
Lineaire motoren worden in feite ook onderverdeeld in lineaire motoren in de lengterichting van de z-as en lineaire motoren in de dwarsrichting. Hoewel het beide lineaire motoren zijn, is het effect heel verschillend. Meestal spreken we van een lineaire motor in de dwarsrichting wanneer we het hebben over een lineaire motor, zoals bijvoorbeeld de lineaire motor in de Apple OPPO Reno 10x zoom.
De theorie achter een lineaire motor in de lengterichting van de z-as verschilt niet veel van die van gewone rotormotoren.
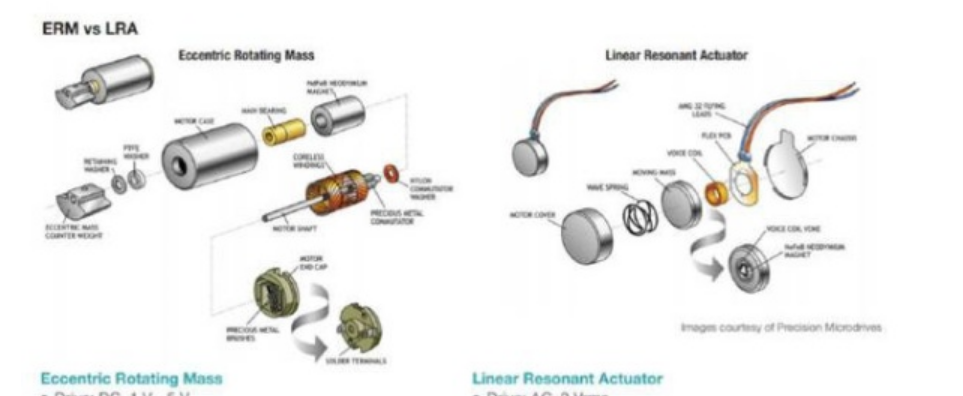
Laterale lineaire motorenZe zijn ontworpen om je heen en weer, naar rechts en naar links te bewegen, waardoor een zeer goede vibratiesensatie ontstaat, bekend als omnidirectionele vibratiefeedback, die directer en driedimensionaler is dan gewone rotormotoren en lineaire motoren in de lengteas.
De kosten van een transversale lineaire motor zijn echter vele malen hoger dan die van een conventionele motor. Bovendien is de motor groter en neemt hij ruimte in beslag die anders door de batterij zou worden ingenomen. Dit stelt hogere eisen aan het ontwerp, de lay-out van de componenten en de regeling van het energieverbruik. Vanwege de hoge kosten en de complexiteit van het ontwerp is de transversale lineaire motor moeilijk op grote schaal te gebruiken.
Softwareoptimalisatie is ook belangrijk.
Naast kosten en ontwerp is er, zelfs met een laterale lineaire motor, nog veel optimalisatie nodig om de gewenste ervaring te bereiken, en dat geldt nog meer voor software dan voor hardware.
Bij de kalibratie van de lineaire motor (LRA) ligt de focus op de gezamenlijke toepassing op systeemniveau. Het is cruciaal om de respons van de lineaire motor te verkrijgen, en tegelijkertijd de frequentie en lengte te meten. Dit zijn allemaal zeer verfijnde aspecten. Om een iPhone-ervaring te bereiken, is naast hardwareondersteuning ook een grondige systeemoptimalisatie essentieel.
Geplaatst op: 25 augustus 2019



