LRA (Çyzykly rezonansly aktuator) motor öndüriji
“Lider Micro” kompaniýasynyňLRA wibratory titreme döredýärwehaptik jogapZ we X ugurlarynda. Onuň jogap beriş wagty we ömri boýunça ERM-lerden has gowy işleýändigi ykrar edilýär, bu bolsa ony telefon we geýilýän wibrasiýa tehnologiýasy üçin amatly edýär.
LRA wibrasiýa hereketlendirijisi ulanyjylar üçin az energiýa sarp edip we haptik tejribäniň hilini ýokarlandyryp, durnukly ýygylykly wibrasiýalary üpjün edýär. Ol sinus tolkunlary tarapyndan döredilen wibrasiýalar bilen döredilýän elektromagnit güýç we rezonans režimi arkaly dik wibrasiýany gazanýar.
Hünärmen hökmündemikroçyzykly Hytaýda motor öndüriji we üpjün ediji, biz müşderileriň isleglerini ýokary hilli çyzykly motor bilen kanagatlandyryp bileris. Eger gyzyklanýan bolsaňyz, "Leader Micro" bilen habarlaşyp bilersiňiz.
Biz näme öndürýäris
LRA (Linear Rezonansly Aktuator) motor, esasan diametri bolan AC bilen işleýän wibrasiýa motorydyr8mm, bu bolsa haptik teslim ulanylyşlarynda giňden ulanylýar. Adaty wibrasiýa hereketlendirijileri bilen deňeşdirilende, LRA wibrasiýa hereketlendirijileri has energiýa tygşytlaýjydyr. Ol çalt başlamak/durmak wagty bilen has takyk jogap berýär.
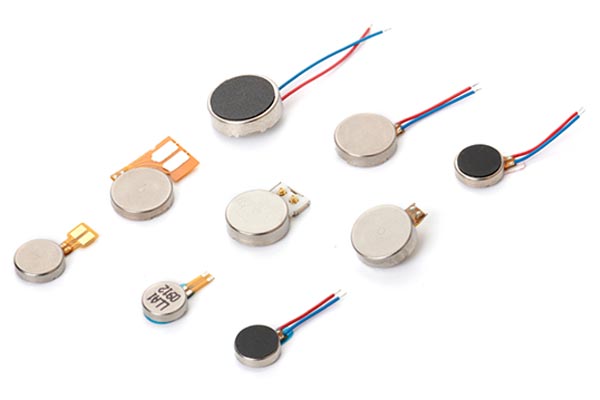
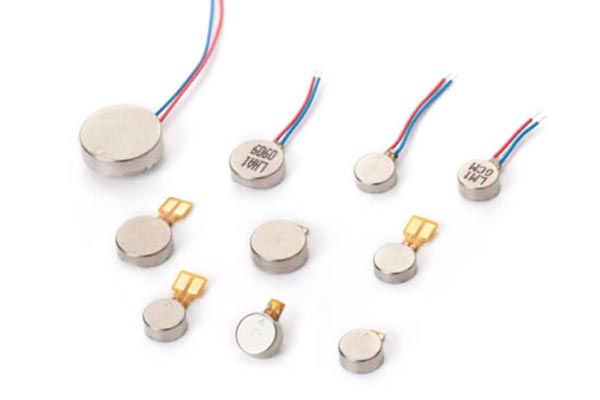
Biziň teňňe şekilli Çyzykly Rezonansly Aktuatorymyz (LRA) motoryň ýüzüne perpendikulýar Z okunyň ugrunda yrgyldamak üçin niýetlenendir. Bu aýratyn Z okunyň titremesi geýilýän ulanylyşlarda titremäni geçirmekde örän netijelidir. Ýokary ygtybarlylykly (Hi-Rel) ulanylyşlarda LRA motory çotkasyz titreme motorlaryna alternatiwa bolup biler, sebäbi aşynmaga we döwülmäge sezewar bolýan ýeke-täk içki bölek ýazdyr.
Kompaniýamyz müşderilerimiziň dürli isleglerini kanagatlandyrmak üçin özleşdirip bolýan tehniki häsiýetnamalary bolan ýokary hilli çyzykly rezonansly aktuatory hödürlemäge borçlanýar. Ýeňil we netijeli çözgütler bilen gyzyklanýarsyňyzmy? Biziň nähiliözeksiz motorlarajaýyp tizlik we takyklyk bilen üpjün ediň!
Z-okly LRA wibrasiýa motorlary: Kompakt, köpugurly taktil çözgütler
BiziňZ okly titreme motorlary(LEADER tarapyndan) örän ykjam yzlarda takyk, jogapkär haptik seslenme berýär — giňişligiň gymmat bolan enjamlary üçin ajaýyp.
Dürli konfigurasiýalarda elýeterli (meselem,6mm×2.5mm), bu wibrasiýa motorlary çeýe integrasiýany goldaýar (bileFPCB ýa-da sim birikmeleri) dürli önüm dizaýnlaryna laýyk gelmek üçin (akylly geýilýän enjamlar, kiçi enjamlar, göçme elektronika).
Her bir model miniatýurlaşdyrmany ygtybarly wibrasiýa öndürijiligi bilen deňleşdirýär, bu bolsa olary kiçi, ýokary isleg bildirilýän enjamlar üçin iň gowy saýlawa öwürýär.







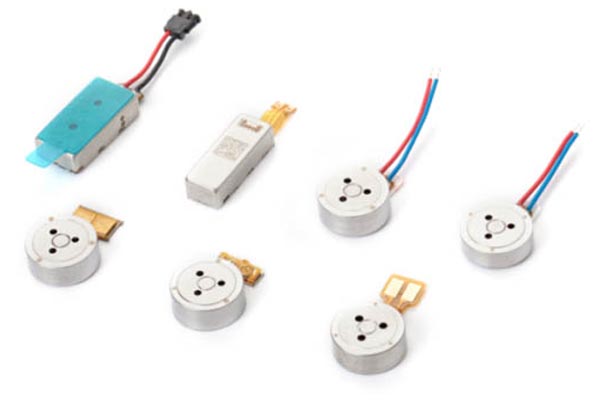
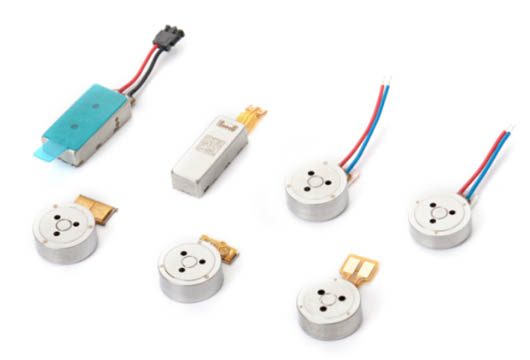
X okly wibrasiýa motorlary: Inçe, ýokary öndürijilikli sensor çözgütleri
LEADER-iň X okly wibrasiýa motorlary netije berýärpes profilli, gönüburçly forma faktorynda maksatly, yzygiderli duýulýan teselli jogap — tekiz, giňişlikde netijeli komponent integrasiýasyny talap edýän enjamlar üçin ajaýyp.
Elýeterli8×9mm (LD0809AA)we8×15mm (LD0815AA) ölçegler, bu LRA wibrasiýa motorlary ygtybarly X-ugurly wibrasiýa döredýär, bu bolsa olary inçe önümler üçin ideal edýärsmartfonlar, planşetler we inçe akylly aksessuarlar.
Olaryň ykjam, ýönekeý dizaýny sensor jogap beriş ukybyna zyýan ýetirmezden, aňsat oturtmagy üpjün edýär.


| Modeller | Ölçegi (mm) | Nominal woltaž (V) | Nominal tok (mA) | Ýygylyk | Voltaž | Tizlenme |
| LD0825 | φ8*2.5mm | 1.8VrmsACSinus tolkun | Maks 85mA | 235±5Hz | 0.1~1.9 Vrms AC | 0.6Grm Min |
| LD0832 | φ8*3.2mm | 1.8VrmsACSinus tolkun | Maks 80mA | 235±5Hz | 0.1~1.9 Vrms AC | 1.2Grm Min |
| LD4512 | 4.0Wx12L 3.5Hmm | 1.8VrmsACSinus tolkun | Maksimum 100mA | 235±10Hz | 0.1~1.85 Vrms AC | 0.30Grm Min |
| LD2024 | Diametri 20mmx24T | 1.2VmsAc Sinus tolkuny | Maks 200mA | 65±10Hz | 0.1~1.2VrmsAC | 2.5±0.5G |
Gözleýän zadyňyzy henizem tapmadyňyzmy? Elýeterli önümler üçin maslahatçylarymyz bilen habarlaşyň.
Programma
Lineý rezonansly aktuatorlaryň käbir ajaýyp artykmaçlyklary bar: örän uzak ömür, sazlanyp bilinýän titreme güýji, çalt jogap, pes ses. Ol smartfonlar, geýilýän enjamlar, VR garnituralar we oýun konsollary ýaly sensorly jogaplary talap edýän elektron önümlerde giňden ulanylýar we ulanyjy tejribesini ýokarlandyrýar.
Smartfonlar
Linear titreme motory smartfonlarda adatça basyşly jogaplar üçin ulanylýar, mysal üçin, ýazmak we düwmelere basmak üçin taktil jogaplary bermek. Ulanyjylar barmaklarynyň ujunyň üsti bilen takyk jogaplary duýup bilýärler, bu bolsa umumy ýazuw takyklygyny ýokarlandyrýar we ýazuw ýalňyşlyklaryny azaldýar. Mundan başga-da, lra basyşly motory bildirişler, jaňlar we signallar üçin titreme duýduryşlaryny berip bilýär. Ol umumy ulanyjy gatnaşygyny gowulandyryp bilýär.

Geýilýän enjamlar
Lineý motoryň titremesi akylly sagatlar, fitnes yzarlaýjylary we beýleki göterilýän enjamlar ýaly geýilýän enjamlarda hem duş gelýär. Lineý rezonansly aktuatorlar gelýän jaňlar, habarlar, e-poçtalar ýa-da signallar üçin titreme duýduryşlaryny berip bilýär, bu bolsa ulanyjylara gündelik işlerini kesmezden dünýä bilen aragatnaşykda galmaga mümkinçilik berýär. Mundan başga-da, mikro lineý motor fitnes yzarlaýyşy üçin, mysal üçin, ädimleri, kaloriýalary we ýürek urşyny yzarlamak üçin haptik seslenme berip bilýär.

VR garnituralary
Sensor täsirine çümmek üçin ýörite çyzykly hereketlendirijileri Oculus Rift ýa-da HTC Vive ýaly VR garnituralarynda hem tapyp bolýar. Özleşdirilen çyzykly hereketlendirijiler atyş, urma ýa-da partlama ýaly oýun içindäki dürli duýgulary simulýasiýa edip bilýän dürli titremeleri berip bilýär. LRA hereketlendirijileri wirtual hakykat tejribelerine başga bir realizm gatlagyny goşýar.

Oýun konsollary
Oýun kontrollerlerinde haptik jogap bermek üçin ýörite çyzykly hereketlendiriji hem ulanylýar. Bu hereketlendirijiler oýundaky möhüm wakalar, mysal üçin, üstünlikli urgular, heläkçilikler ýa-da beýleki oýun hereketleri üçin wibrasiýa jogap berip bilýärler. Olar oýunçylara has çuňňur oýun tejribesini berip bilýärler. Bu wibrasiýalar oýunçylara ýarag atmaga taýýar bolanda duýduryş bermek ýa-da täzeden doldurmak ýaly fiziki alamatlary hem berip bilýär.

Gysgaça aýdylanda, çyzykly hereketlendiriji wibrasiýa motorlarynyň ulanylyşy giňden ýaýran bolup, smartfonlardan başlap, oýun konsollaryna çenli dürli ulgamlarda ulanylýar we dürli programmalarda ulanyjy tejribesini ep-esli gowulandyryp biler.
LRA motorlary titremäni nähili döredýär
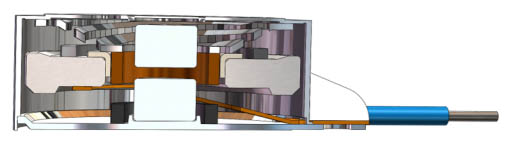
Biziň inçe, ykjam LRA motorlarymyz hususy gurluş dizaýny we patentlenen tehnologiýalar arkaly mümkin boldy — bu innowasiýalar ultra-miniatýurlaşdyrylan görnüş faktorynda güýçli titreme çykaryşyny üpjün edýär.
LRA motorlary titremäni nähili döredýär
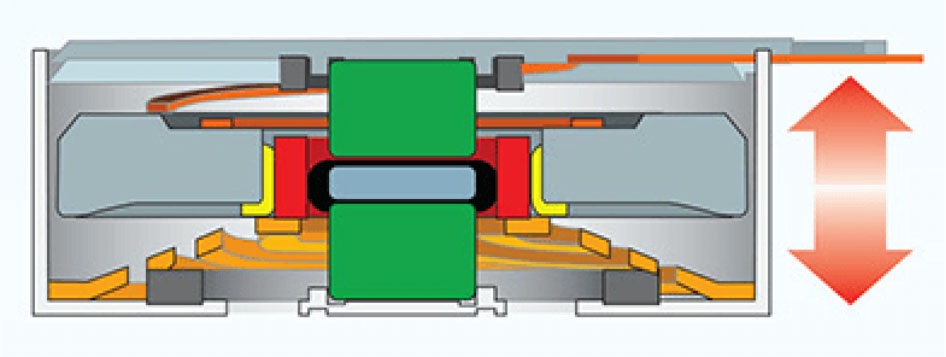
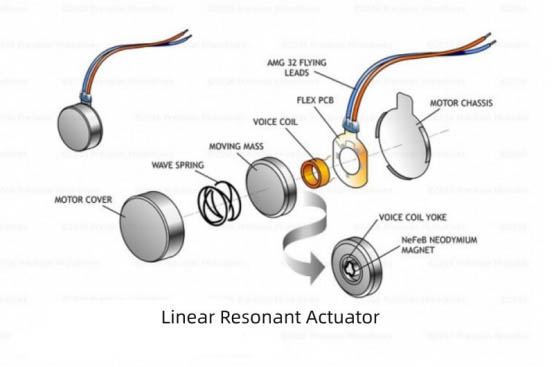
LRA-nyň içinde ses spiraly hereket edýän magnit massasy bilen özara täsirleşende üýtgewsiz galýar. Işjeňleşdirilende, spiral bu massany içki ýaýlara garşy ýokary we aşak ylgamak üçin herekete getirýär. Bu gaýtalanýan hereket tutuş LRA birligini süýşürýär we ulanyjylaryň titremesini duýmagyny döredýär.
Bu mehanizm dinamik tehnologiýasy bilen meňzeşlikleri paýlaşýar: dinamikler (AC signallaryny ses çykarmak üçin howanyň üýtgemegine öwürýän dinamikler) ýaly, LRA-lar üýtgeýän toguň (AC) ýygylygyny we amplitudasyny çalt yrgyldaýan magnit massasy arkaly fiziki titreme hereketine öwürýär. Şeýle-de bolsa, dinamiklerden (giň ýygylyk diapazonlarynda işleýän) tapawutlylykda, LRA hereketlendirijileri belli bir ýygylyk zolaklary üçin takyk sazlanýar - bu bolsa olary maksatly haptik teslim ulanylyşlary üçin ideal edýär.
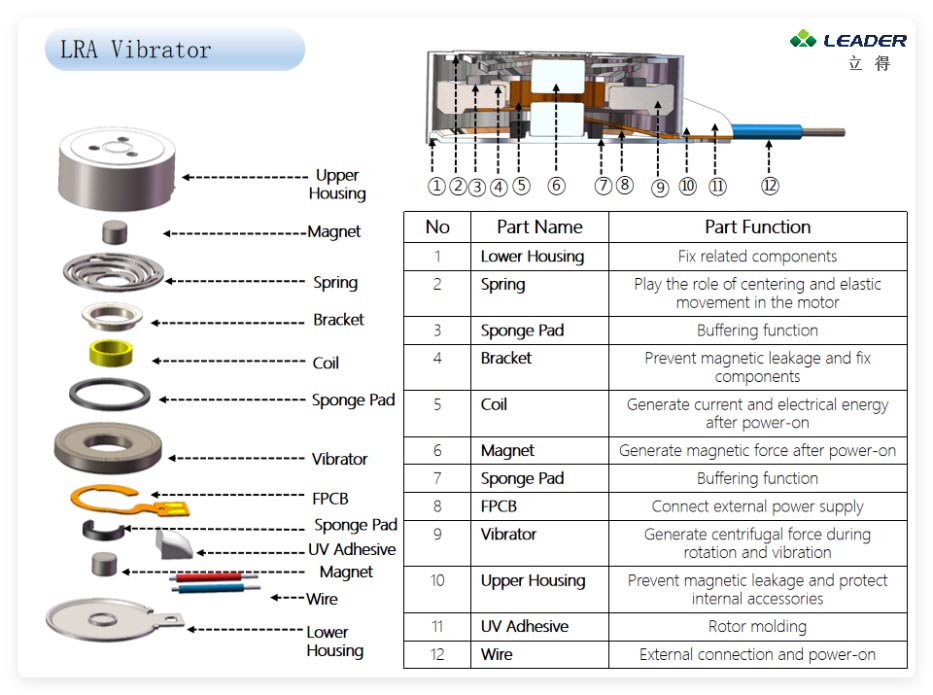
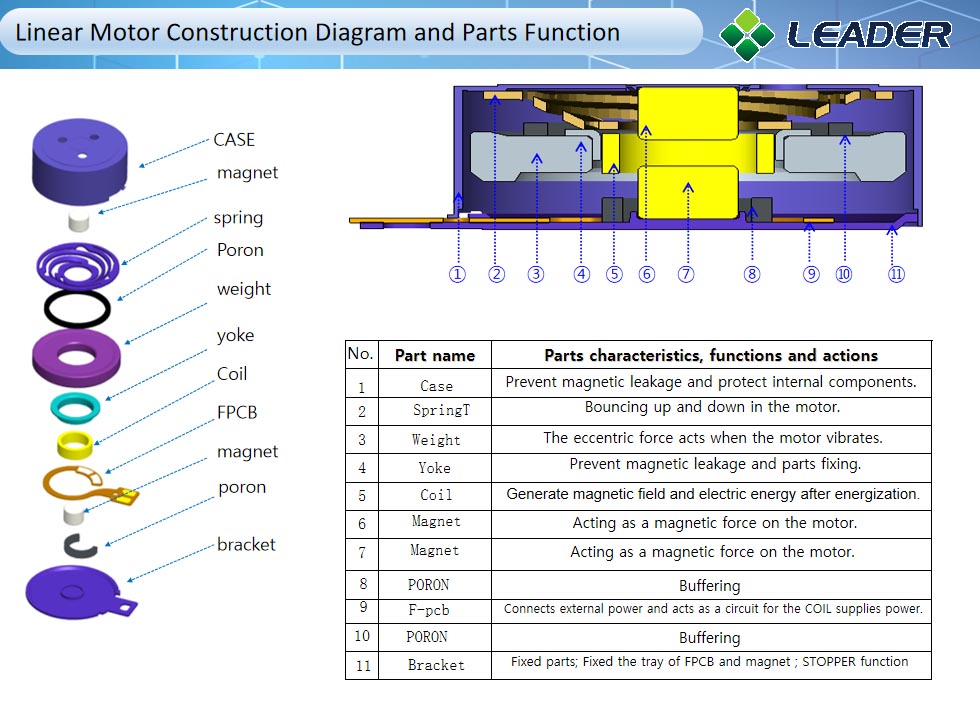
Linear Rezonansly Aktiwatoryň Komponentleri
Linear Titreşimli Motorlar: Çalt Jogap Bermek, Takyk Dolandyryş we Akylly Tormozlama
Linear titreme motorlary (LRA) özleriniň örän çalt işe girizilmegi bilen tapawutlanýar - adatça 5-10 millisekunt aralygynda işe girýär - bu bolsa eksentrik aýlanýan massa (ERM) motorlarynyň haýal jogabyndan düýpli tapawutlanýar.
Bu çalt aktiwleşme magnit özeniniň derrew hereketinden gelip çykýar: tok enjamyň ses spiralyndan geçensoň, magnit bölegi derrew reaksiýa berýär.
Deňeşdirmek üçin, ERM motorlary takyk titreme döretmezden öň iş tizligine ýetmek üçin wagt talap edýär; has çalt tizlenme üçin aşa köp işledilende-de, ERM-ler köplenç islenýän titreme intensiwligine ýetmek üçin 20–50 millisekunt gerek bolýar.
LRA motorynyň häsiýetnamalary we funksiýalary
Aýratynlyklary:
- Pes woltly işleýiş:LRA motory 1.8v pes woltly işleýär, bu bolsa ony minimal energiýa sarp edilişini talap edýän kiçi elektron enjamlar üçin amatly edýär.
- Kompakt ölçeg:LRA motorynyň kiçi ölçegleri ony çäkli meýdany bolan enjamlarda ulanmaga mümkinçilik berýär.
- Çalt başlamak/durmak wagty: LRA motorynyň çalt başlama/durma wagty bar, bu bolsa ulanyja has takyk sensorly seslenme bermäge mümkinçilik berýär.
- Pes sesli işleýiş:Bu motorlar sessiz işleýär, bu bolsa minimal ses öndürmegi talap edýän enjamlar üçin möhümdir.
- Özelleşdirip bolýan ýygylyk we amplituda sazlamalary:LRA motorynyň ýygylyk we amplituda sazlamalary enjamyň belli bir talaplaryna laýyklyk üçin sazlanyp bilner.
Funksiýalar:
- LRA motory enjam bilen ulanyjy tejribesini ýokarlandyrmak üçin takyk we netijeli sensorly seslenme berýär.
-LRA motory tarapyndan üpjün edilýän duýgy, ulanyjynyň enjam bilen tejribesini artdyrýar we ony ulanmagy has ýakymly edýär.
- LRA motorlary az energiýa sarp edýär, bu bolsa olary energiýany tygşytlamak üçin niýetlenen enjamlar üçin amatly edýär.
- LRA motorlary adaty wibrasiýa motorlaryna garanyňda has gözegçilikli we yzygiderli wibrasiýa jogabyny üpjün edýär.
- LRA motorynyň ýygylyk we amplituda sazlamalary enjamyň dürli aýratynlyklaryna laýyk gelmek üçin sazlanyp bilner.
LRA-lar üçin esasy dizaýn ugurlary:
Pružin inženerçiligi we dartgynlyk seljermesi (çeýeligi we berkligi deňleşdirmek üçin)
Elektromagnit meýdanyny optimizirlemek (netijeli güýç döretmek üçin)
Titreşme güýjüni dolandyrmak (yzygider işlemegi we uzak ömürli bolmagy üpjün etmek üçin)
LRA-lar üçin möhüm bir zat olaryň tebigy durma wagtydyr: iş wagtynda içki ýazlarda saklanýan kinetiki energiýa sebäpli, olar şu wagta çenli wagt alyp bilerler.300 millisekundözbaşdak sessizleşdirmek üçin. Şeýle-de bolsa, muny işjeň tormozlamak bilen çözüp bolýar: hereketlendirijä berilýän AC signalynyň fazasyny üýtgetmek arkaly180 gradus, ýazyň yrgyldamagyna garşy durmak üçin garşy güýç döredilýär we yrgyldamagy takmynan togtadýar10 millisekundtakyk, isleg boýunça gözegçilik üçin.
Linear Rezonans Aktuatory: Rezonans arkaly netijeli titreme
Ses spiralynyň güýjüni gönüden-göni ýüze geçirýän däp bolan dizaýnlardan tapawutlylykda, biziň çyzykly rezonansly hereketlendirijimiz (LRA) içki ýaz ulgamynyň rezonans ýygylygyndan peýdalanmak arkaly energiýa sarp edilişini azaldýar. Ses spiral magnit massasyny ýazyň tebigy rezonans ýygylygynda yrgyldamaga gönükdirende, enjam titreme amplitudasyny has netijeli güýçlendirýär - az energiýa bilen has güýçli taktil teselli berýär.
Kondisioner bilen işleýän bu LRA, titreşim ýygylygyny we amplitudasyny özbaşdak sazlap, duýgy duýgusyny has gowy sazlamaga mümkinçilik berýär. Bu çeýelik ony ERM motorlaryndan tapawutlandyrýar, bu ýerde ýygylyk we amplituda içki taýdan baglanyşyklydyr (birini üýtgetmek beýlekisini awtomatiki usulda üýtgedýär).
Energiýa tygşytlaýjy hakyky dünýäde ulanylyş: Akylly geýilýän enjamlar
Batareýa bilen işleýän akylly sagatlar üçin (olar kiçi, az kuwwatly böleklere daýanýar), LRA-myzyň rezonansly dizaýny titreme bilen baglanyşykly güýç sarp edilişini azaldýar.30%+ däp bolan ERM-ler bilen deňeşdirilende. Mysal üçin: bu LRA ulanýan fitnes yzarlaýjysy batareýanyň gündelik ömrüni uzaldyp, aýdyň "habar beriş seslenmesini" saklap biler1,5 sagat— her mAh-yň gymmatly bolýan enjamlary üçin möhüm itergi.
Sensor ekranly kontrollerlerde (senagat panellerinde ulanylýar), LRA-nyň garaşsyz ýygylyk/amplituda gözegçiligi gereksiz energiýa ýitgisini hem azaldýar: ol ERM-ler ýaly sabit (we köplenç güýçli) çykyşda işlemän, diňe işe girizilende takyk "klik" ýa-da "haptik tekstura" jogabyny berýär.
LRA wibrasiýa motorlarynyň esasy artykmaçlyklary
Ultra-Çalt Jogap Işleýärdiňe 5–10ms (ERM motorlaryndan has çalt)), wagta duýgur özara täsirler üçin derrew, takyk haptik jogap beriş mümkinçiligini üpjün edýär (meselem, sensor ekranly basyşlar, bildiriş duýduryşlary).
Energiýa netijeliligi Titreşme amplitudasyny güýçlendirmek üçin pružin rezonansyny ulanýar we energiýa sarp edilişini minimal energiýa sarp edilişi bilen azaldýar.30%+ garşy. göçme enjamlar (geýilýän enjamlar, smartfonlar) üçin batareýanyň ömrüni uzaldýan däp bolan motorlar.
Parametrleriň garaşsyz gözegçiligi titreme ýygylygynyň we amplitudasynyň aýratyn sazlanmagyna mümkinçilik berýär,özelleşdirilip bilinýän duýgy tejribelerini goldamak (meselem, ERM motorlarynyň deňeşdirip bilmeýän tapawutly "basmak" we "gygyrdamak" seslenmesi).
Ykjam we pes profilli dizaýn Inçe, ýer tygşytlaýjy görnüş faktorlary (mysal üçin, kiçi diametrler/galyňlyklar) kiçi önümlere sazlaşykly gabat gelýär (akylly sagatlar, gulaklyklar) öndürijiligi pese gaçyrmazdan.
Takyk işjeň tormozlama titremäni ~ aralygynda saklap bilýär10ms(arkaly180°AC signalynyň faza üýtgemesi), dowam edýän rezonansy aradan aýyrmak we talap boýunça aýdyň, ters aragatnaşygyň kesilmegini üpjün etmek.
Linear Rezonans Aktuatory bilen baglanyşykly patentler
Kompaniýamyz LRA (Linear Rezonansly Aktuator) motor tehnologiýasy bilen baglanyşykly birnäçe patent şahadatnamasyny aldy, bu bolsa pudagyň öňdebaryjy innowasiýa we ylmy-barlag işlerimizi görkezýär. Bu patentler titreme aktuator tehnologiýasynyň dürli taraplaryny, şol sanda onuň dizaýnyny, önümçilik prosesini we ulanylyşyny öz içine alýar. Patentlenen tehnologiýalarymyz müşderilerimiziň özboluşly isleglerini kanagatlandyrýan ýokary hilli, energiýa tygşytlaýjy we özleşdirip bolýan LRA motorlaryny hödürlemäge mümkinçilik berýär.
Patentleriň biri uly amplitudaly çyzykly wibrasiýa hereketlendirijisiniň dizaýny barada. Stator toplumynyň we rotor toplumynyň oturdylýan tarapynyň beýleki tarapyna demping meýdançasy gurnalýar. Demping meýdançasy rotor toplumynyň korpusyň içinde titreýän wagty korpus bilen berk çaknyşmagyň öňüni alyp biler, bu bolsa çyzykly wibrasiýa hereketlendirijisiniň hyzmat möhletini uzaldýar. Çyzykly wibrasiýa hereketlendirijisiniň amplitudasyny artdyrmak üçin rulonyň daşyna magnit halkasy goýulýar. Şeýle hem, çyzykly wibrasiýa hereketlendirijileri bilen enjamlaşdyrylan elektron enjamlary ulanylanda sensor tejribesini optimizirläp biler.
Umuman alanyňda, biziň patentlenen LRA motor tehnologiýamyz bizi beýleki pudak oýunçylaryndan tapawutlandyrýar we müşderilerimize ýokary hilli, innowasion we energiýa tygşytlaýjy önümleri hödürlemäge mümkinçilik berýär. Biz tehnologiýa innowasiýalaryny öňe sürmäge we elektron enjamlarda ulanyjy tejribesini ýokarlandyrmak üçin öňdebaryjy çözgütleri hödürlemäge ygrarly bolmagymyzy dowam etdirýäris.
Micro LRA motorlaryny ädimme-ädim köpçülikleýin alyň
Linear Haptic Motor barada köp soralýan soraglar
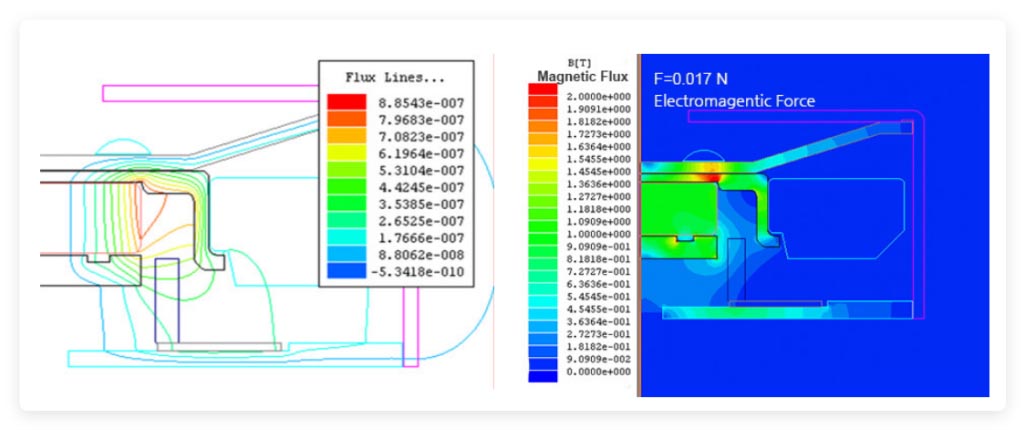
Tersine,titreme motorlaryadatça elektromehaniki kommutasiýany ulanýan,LRA (çyzykly rezonansly aktuator) titreme motorlaryses spiralyny ulanyp, çotkasyz usulda hereket edip, massany herekete getirýär. Bu dizaýn döwülme howpuny azaldýar, sebäbi döwülmäge sezewar bolýan ýeke-täk hereket edýän bölek ýazdyr. Bu ýazlar toplumlaýyn gutarnykly elementler seljermesinden (FEA) geçýär we ýadawlyk däl aralygynda işleýär. Döwülme usullary, esasan, mehaniki döwülmeleriň azalmagy sebäpli içki bölekleriň könelmegi bilen baglanyşyklydyr.
(Çekli elementleriň seljermesi (FEA) dürli fiziki şertlerde obýektiň nähili hereket edip biljekdigini çaklamak we düşünmek üçin hasaplamalaryň, modelleriň we simulýasiýalaryň ulanylmagydyr.)
Netijede, LRA titreme hereketlendirijileriniň döwülmegine çenli ortaça wagty has uzak bolýar (MTTF) adaty çotkaly eksentrik aýlanýan massa (ERM) titreme hereketlendirijilerinden has köp.
LRA motorlarynyň ömrü, adatça, beýleki motorlara garanyňda has uzak bolýar.2 sekunt açyk / 1 sekunt ýapyk şertinde ömür dowamlylygy bir million sikldir.
Linear titreme aktuatory geýilýän enjamlar, lukmançylyk enjamlary we oýun kontrollerleri ýaly dürli elektron enjamlar bilen utgaşyklydyr.
Hawa, çyzykly wibrasiýa motorlaryny işletmek üçin motor sürüjisi gerek. Motor sürüjisi şeýle hem wibrasiýanyň intensiwligini dolandyrmaga we motory artykmaç ýüklenmeden goramaga kömek edip biler.
Lineý rezonansly aktuatorlaryň (LRA) taryhyny şahsy elektron enjamlarda eksentrik aýlanýan massa (ERM) wibrasiýa hereketlendirijileriniň ulanylmagy bilen baglanyşdyryp bolýar. Motorola ilkinji gezek 1984-nji ýylda BPR-2000 we OPTRX peýjerlerinde wibrasiýa hereketlendirijilerini hödürledi. Bu hereketlendirijiler ulanyja wibrasiýa arkaly duýduryş bermegiň sessiz usulyny üpjün edýär. Wagtyň geçmegi bilen has ygtybarly we ykjam wibrasiýa çözgütlerine bolan zerurlyk lineý rezonansly aktuatorlaryň işlenip düzülmegine getirdi. Lineý aktuatorlar diýlip hem atlandyrylýan LRA-lar has ygtybarly we köplenç däp bolan ERM hereketlendirijilerinden kiçi. Olar tiz wagtda haptik yzyna alyş programmalarynda we esasy wibrasiýa duýduryşlarynda meşhur boldy. Häzirki wagtda LRA dürli elektron enjamlarda, mysal üçin, ykjam telefonlarda, smartfonlarda, geýilýän enjamlarda we wibrasiýa funksiýasyny talap edýän beýleki kiçi enjamlarda giňden ulanylýar. Olaryň ykjam ölçegleri we ygtybarlylygy olary ulanyjy tejribesini ýokarlandyrmak üçin taktil yzyna alyş bermek üçin amatly edýär. Umuman, ERM hereketlendirijilerinden şahsy elektron enjamlardaky LRA-lara geçiş enjamlar ulanyjylara yzyna alyş bermegiň usulynda rewolýusiýa döretdi we has kämil we netijeli wibrasiýa tejribesini üpjün etdi.
Adaty çotkaly DC titreme hereketlendirijilerinden tapawutlylykda, çyzykly rezonansly aktuatorlaryň (LRA) dogry işlemegi üçin rezonans ýygylygyndaky AC signaly gerek. Olary DC naprýaženiýe çeşmesinden gönüden-göni herekete getirip bolmaýar. LRA-nyň simleri adatça dürli reňklerde (gyzyl ýa-da gök) bolýar, ýöne olaryň polýarlygy ýok. Sebäbi hereketlendiriji signaly DC däl-de, AC-dir.
Ekssentrik aýlanýan massa (ERM) wibrasiýa hereketlendirijilerinden tapawutlylykda, LRA-daky hereketlendirijiniň naprýaženiýesiniň amplitudasyny sazlamak diňe ulanylýan güýje (G güýji bilen ölçenýär) täsir edýär, emma wibrasiýa ýygylygyna täsir etmeýär. Dar geçirijilik zolagy we ýokary hilli faktory sebäpli, LRA-nyň rezonans ýygylygyndan ýokary ýa-da aşak ýygylyklary ulanmak wibrasiýa amplitudasynyň azalmagyna ýa-da rezonans ýygylygyndan düýpli tapawutlanýan bolsa, asla wibrasiýanyň bolmazlygyna getirýär. Belläp geçmeli zat, biz köp rezonans ýygylyklarynda işleýän giň zolakly LRA-lary we LRA-lary hödürleýäris.
Eger siziň haýsydyr bir aýratyn talaplaryňyz ýa-da goşmaça soraglaryňyz bolsa, bize habar beriň, biz size kömek etmäge şat bolarys.
RA (Linear Rezonansly Aktuator) titreme döredýän aktuatordyr. Ol, adatça, smartfonlar we oýun kontrollerleri ýaly enjamlarda taktil seslenme bermek üçin ulanylýar. LRA rezonans prinsipi esasynda işleýär.
Ol spirallardan we magnitlerden ybarat. Üýtgeşik tok spiraldan geçende, magnit bilen özara täsirleşýän magnit meýdanyny döredýär. Bu özara täsir magnitiň çalt öňe-yza hereket etmegine sebäp bolýar.
LRA bu hereket wagtynda tebigy rezonans ýygylygyna ýetýän görnüşde döredildi. Bu rezonans titremeleri güýçlendirýär, ulanyjylaryň olary anyklamagyny we duýmagyny ýeňilleşdirýär. Sargyçdan geçýän üýtgeýän toguň ýygylygyny we intensiwligini dolandyrmak arkaly enjam dürli derejeleri we titreme görnüşlerini döredip bilýär.
Bu bolsa bildiriş titremeleri, sensorly titremeler ýa-da immersiw oýun tejribesi ýaly dürli haptik teslim täsirlerini döretmäge mümkinçilik berýär. Umuman, LRA-lar gözegçilik edilýän we duýulýan hereketi döredýän titremeleri döretmek üçin elektromagnit güýçleri we rezonans ýörelgelerini ulanýarlar.
Motoryň esasy aýratynlyklaryny, mysal üçin: Ölçegleri, Ulanylyşy, Voltažy, Tizligi bermeli. Mümkin bolsa, bize ulanylyş prototipiniň çyzgylaryny hödürlemek has gowy bolar.
Biziň kiçi DC motorlarymyz öý enjamlary, ofis enjamlary, saglygy goraýyş, ýokary derejeli oýunjaklar, bank ulgamlary, awtomatlaşdyrma ulgamlary, geýilýän enjamlar, töleg enjamlary we elektrik gapy gulplary ýaly dürli pudaklarda ulanylyşyny tapýar. Bu motorlar dürli ulanylyşlarda ygtybarly we netijeli işlemegi üpjün etmek üçin niýetlenendir.
Diametr6mm ~ 12mm DC Mikro Motor, Elektrik motory, Çotgaly DC Motor,Çotgasyz DC Motor, Mikro Motor,çyzykly motor, LRA motory,silindrli özeksiz wibrasiýa motory, smt motory we ş.m.
LRA Linear Vibrasiýa Motorlary barada has köp biliň
1. LRA-nyň (linear rezonansly aktuatoryň) taryhy
ERM wibrasiýa hereketlendirijileriniň şahsy elektron enjamlarda ulanylmagy ilkinji gezek 1984-nji ýylda Motorola tarapyndan öňe sürüldi. BPR-2000 we OPTRX peýjerleri bu aýratynlygy öz içine alan ilkinji enjamlaryň arasynda bolup, ulanyja sessiz jaň duýduryşlaryny we ykjam wibrasiýa jogabyny berdi. Häzirki wagtda LRA-lar (çyzykly hereketlendirijiler diýlip hem atlandyrylýar) kiçi ölçeglerde ýokary ygtybarlylygy hödürleýär. Olar adatça doptik jogap beriş programmalarynda we esasy wibrasiýa signalizasiýa funksiýalarynda ulanylýar. Çyzykly wibrasiýa hereketlendirijileri ykjam telefonlarda, smartfonlarda, geýilýän enjamlarda we wibrasiýa funksiýalaryny talap edýän beýleki kiçi enjamlarda giňden ulanylýar.
2. Sürüji IC
Lider mikro çyzykly motor LD0832 we LD0825 TI DRV2604L ýa-da DRV2605L ýaly sürüji IC bilen ulanylmaly. TI (Texas Instruments) bu IC çipi bolan baha beriş tagtasyny satýar. Salgylanmany barlaň: https://www.ti.com/lsds/ti/motor-drivers/motor-haptic-driver-products.page
Eger has netijeli IC isleýän bolsaňyz, size şol bir öndürijilikli, ýöne arzan bahaly hytaý üpjün edijilerini maslahat berip bileris.
3. LRA zynjyr komponenti hökmünde
LRA motorlary bir zynjyra birikdirilende, olar köplenç deň derejeli zynjyrdan daşary ýönekeýleşdirilýär, esasanam DRV2603 ýaly ýörite LRA sürüji çipi bilen hereketlendirilende. Dizaýnerler we inženerler LRA-ny aýratyn IC-niň degişli kontaktlaryna birikdirmek arkaly wagt tygşytlap we ulgamyň beýleki taraplaryna üns berip bilerler.
LRA-lar tarapyndan yzky EMF öndürilmegine garamazdan, köp LRA sürüjileri bu täsiri duýujy mehanizm hökmünde ulanýarlar. Käbir sürüji IC yzky EMF-ni ölçeýär. Olar bu maglumaty rezonansy tapmak üçin sürüji signalynyň ýygylygyny sazlamak üçin ulanýarlar. Bu önümiň şertlere ýa-da ýaşa garamazdan has ýakyn çäklerde we derejelerde işlemegine mümkinçilik berýär.
LRA motorlarynyň netijeli usulda çotkasyzdygyny bellemek möhümdir. Olar DC ERM motorlarynda kollektor ýaýynyň döremegi bilen baglanyşykly elektromagnit zyňyndylaryndan ejir çekmeýärler. Bu aýratynlyk, çotkasyz ERM motorlaryna meňzeş, LRA-lary, adatça, ATEX sertifikatlaşdyrylan enjamlar üçin amatly edýär.
4. Linear rezonansly aktuatorlary / linear wibratorlary herekete getirmek
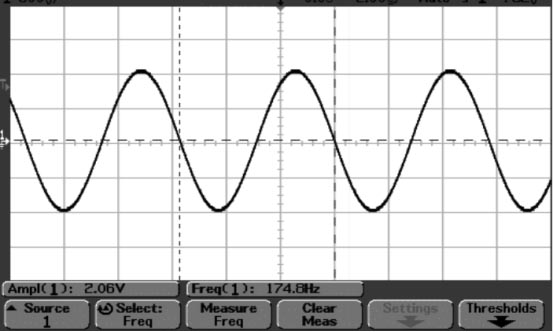
LRA çyzykly wibratorlarynyň işlemegi üçin, dinamikler ýaly, AC signaly gerek. Aşakdaky suratda görkezilişi ýaly, rezonans ýygylygynda sinus tolkun signalyny ulanmak iň gowusydyr.
Elbetde, has ösen taktil ters täsirleri döretmek üçin hereketlendiriji tolkun görnüşiniň amplitudasy modulirlenip bilner.
5. Linear wibratorlar üçin uzaldylan ömür möhleti
LRA wibrasiýa motorlary köp wibrasiýa motorlaryndan tapawutlanýar, sebäbi olar massany hereketlendirmek üçin ses spiralyny ulanýarlar we bu bolsa olary netijeli çotgasyz edýär.
Bu dizaýn pružinalaryň döwülmeginiň mümkinçiligini iň pes derejä düşürýär, ol bolsa gutarnykly element analizi (FEA) arkaly modelleşdirilen we ýadawlyk bolmadyk zolakda işleýär. Mehaniki aşynma minimal we esasy döwülme režimi içki bölekleriň könelmegi bilen çäklenýändigi sebäpli, döwülmegiň ortaça wagty (MTTF) adaty çotkaly eksentrik aýlanýan massa (ERM) wibrasiýa hereketlendirijileri bilen deňeşdirilende has uzakdyr.
Lider Linear Motor Öndürijileri bilen maslahatlaşyň
Biz size mikro LRA motorlaryňyza gerek bolan hili we gymmatlylygy wagtynda we býujete laýyklykda üpjün etmek üçin kynçylyklaryň öňüni almaga kömek edýäris.