

G ass eng Eenheet déi allgemeng benotzt gëtt fir d'Amplitude vun enger Schwéngung ze beschreiwenVibratiounsmotorena linear resonant Aktuatoren. Et representéiert d'Schwéierkraaftbeschleunigung, déi ongeféier 9,8 Meter pro Quadratsekonn (m/s²) ass.
Wann mir e Schwéngungsniveau vun 1G soen, heescht dat, datt d'Schwéngungsamplitude gläichwäerteg mat der Beschleunigung ass, déi en Objet duerch d'Schwéierkraaft erlieft. Dëse Verglach erlaabt eis, d'Intensitéit vun der Schwéngung an hire potenziellen Impakt op dat aktuellt System oder d'Applikatioun ze verstoen.
Et ass wichteg ze bemierken, datt G just eng Method ass fir d'Amplitude vun der Schwéngung auszedrécken, si kann och an aneren Eenheeten gemooss ginn, wéi Meter pro Quadratsekonn (m/s²) oder Millimeter pro Quadratsekonn (mm/s²), ofhängeg vun de spezifesche Fuerderungen oder dem Standard. Trotzdem bitt d'Benotzung vu G als Eenheet e kloere Referenzpunkt an hëlleft de Clienten, d'Schwéngungsniveauen op eng relevant Manéier ze verstoen.
Wat ass de Grond, firwat d'Verrécklung (mm) oder d'Kraaft (N) net als Mooss fir d'Vibratiounsamplitude benotzt ginn?
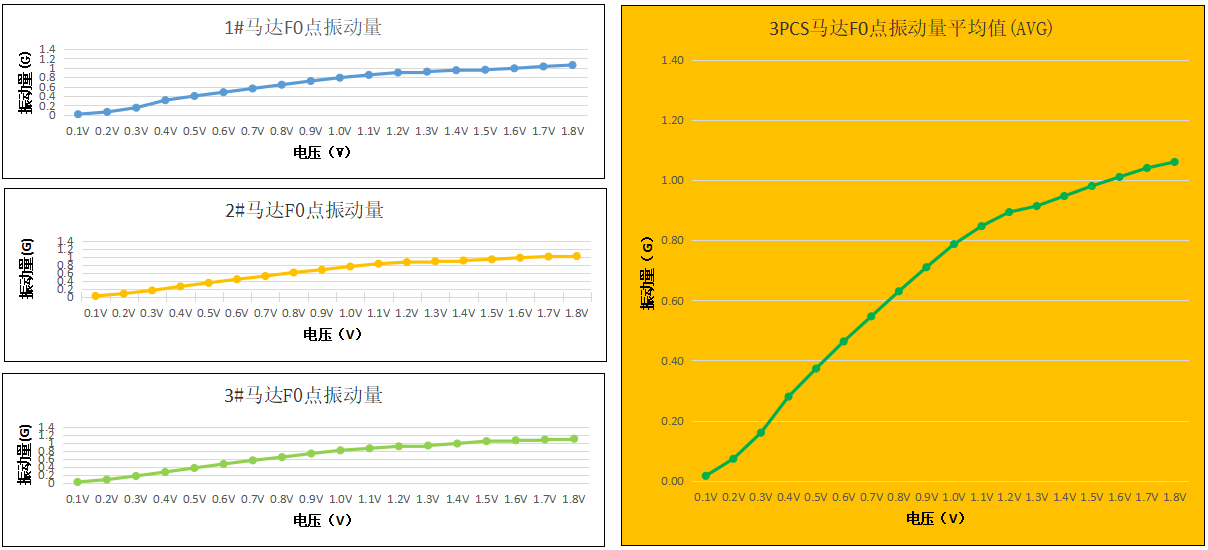
Vibratiounsmotorenginn typescherweis net eleng benotzt. Si ginn dacks a gréisser Systemer zesumme mat Zilmassen integréiert. Fir d'Vibratiounsamplitude ze moossen, montéiere mir de Motor op enger bekannter Zilmass a benotzen en Accelerometer fir d'Donnéeën ze sammelen. Dëst gëtt eis e méi kloert Bild vun de gesamte Vibratiounseigenschaften vum System, déi mir dann an engem typeschen Leeschtungseigenschaftsdiagramm illustréieren.
D'Kraaft, déi vum Vibratiounsmotor ausgeübt gëtt, gëtt duerch déi folgend Equatioun bestëmmt:
$$F = m \times r \times Ω^{2}$$
(F) representéiert d'Kraaft, (m) representéiert d'Mass vun der exzentrescher Mass um Motor (onofhängeg vum ganze System), (r) representéiert d'Exzentrizitéit vun der exzentrescher Mass, an (Ω) representéiert d'Frequenz.
Et sollt een drop hiweisen, datt nëmmen d'Vibratiounskraaft vum Motor den Afloss vun der Zilmass ignoréiert. Zum Beispill brauch en méi schwéiert Objet eng méi grouss Kraaft fir datselwecht Beschleunigungsniveau ze produzéieren wéi en méi klengen a méi liichten Objet. Wann also zwee Objeten deeselwechte Motor benotzen, vibréiert dat méi schwéiert Objet mat enger vill méi klenger Amplitude, obwuel d'Motoren déiselwecht Kraaft produzéieren.
En aneren Aspekt vum Motor ass d'Vibratiounsfrequenz:
$$ f = \frac{Motorgeschwindegkeet \:(RPM)}{60}$$
D'Verrécklung, déi duerch Schwéngungen verursaacht gëtt, gëtt direkt vun der Frequenz vun de Schwéngungen beaflosst. An engem vibréierenden Apparat wierken Kräften zyklisch op de System. Fir all ausgeübte Kraaft gëtt et eng gläichméisseg a géigeniwwerléisend Kraaft, déi se schlussendlech opléist. Wann d'Frequenz vun de Schwéngungen méi héich ass, verkierzt sech d'Zäit tëscht dem Optriede vu géigeniwwerléisende Kräften.
Dofir huet de System manner Zäit fir sech ze verréckelen, ier géigneresch Kräften en ausgläichen. Zousätzlech huet e méi schwéiert Objet eng méi kleng Verrécklung wéi e méi liichten Objet, wann en der selwechter Kraaft ausgesat ass. Dëst ass ähnlech wéi den Effekt, deen uewe betreffend d'Kraaft erwähnt gouf. E méi schwéiert Objet brauch méi Kraaft fir déiselwecht Verrécklung z'erreechen wéi e méi liichten Objet.
Kontaktéiert eis
Eis Equipe kann Ënnerstëtzung an Hëllef ubiddenelektresche VibratiounsmotorProdukter. Mir verstinn, datt d'Verstoe, d'Spezifizéierung, d'Validéierung an d'Integratioun vu Motorprodukter an Endapplikatioune komplex ka sinn. Mir hunn d'Wëssen an d'Expertise fir d'Risiken am Zesummenhang mam Motordesign, der Fabrikatioun an der Liwwerung ze reduzéieren. Kontaktéiert eis Equipe haut fir Är motorbezunnen Bedierfnesser ze diskutéieren an eng Léisung ze fannen, déi Äre spezifesche Bedierfnesser entsprécht. Mir sinn hei fir ze hëllefen.
Consultéiert Är Leader-Experten
Mir hëllefen Iech, d'Falgen ze vermeiden, fir déi Qualitéit a Wäert ze liwweren, déi Äre Mikro-Bürstenlosmotor brauch, pünktlech an am Kader vum Budget.
Zäitpunkt vun der Verëffentlechung: 17. November 2023



