

G ialah unit yang biasa digunakan untuk menggambarkan amplitud getaran dalammotor getarandan penggerak resonan linear. Ia mewakili pecutan akibat graviti, iaitu kira-kira 9.8 meter sesaat kuasa dua (m/s²).
Apabila kita mengatakan tahap getaran 1G, ia bermakna amplitud getaran adalah bersamaan dengan pecutan yang dialami objek akibat graviti. Perbandingan ini membolehkan kita memahami keamatan getaran dan potensi kesannya terhadap sistem atau aplikasi semasa.
Penting untuk diperhatikan bahawa G hanyalah cara untuk menyatakan amplitud getaran, ia juga boleh diukur dalam unit lain seperti meter sesaat kuasa dua (m/s²) atau milimeter sesaat kuasa dua (mm/s²), bergantung pada keperluan atau piawaian khusus. Walau bagaimanapun, penggunaan G sebagai unit memberikan titik rujukan yang jelas dan membantu pelanggan memahami tahap getaran dengan cara yang relevan.
Apakah sebab untuk tidak menggunakan anjakan (mm) atau daya (N) sebagai ukuran amplitud getaran?
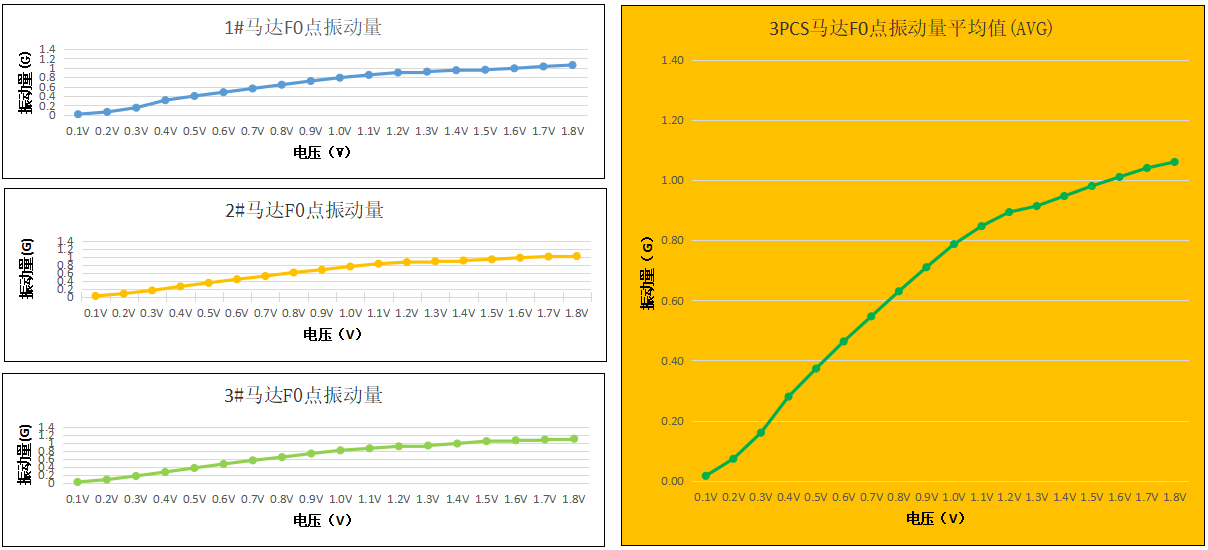
Motor getaranbiasanya tidak digunakan secara bersendirian. Ia sering digabungkan ke dalam sistem yang lebih besar bersama-sama dengan jisim sasaran. Untuk mengukur amplitud getaran, kami memasang motor pada jisim sasaran yang diketahui dan menggunakan pecutan untuk mengumpul data. Ini memberi kami gambaran yang lebih jelas tentang ciri-ciri getaran keseluruhan sistem, yang kemudiannya kami gambarkan dalam gambar rajah ciri prestasi biasa.
Daya yang dikenakan oleh motor getaran ditentukan oleh persamaan berikut:
$$F = m \kali r \kali \omega ^{2}$$
(F) mewakili daya, (m) mewakili jisim jisim eksentrik pada motor (tanpa mengira keseluruhan sistem), (r) mewakili eksentrik jisim eksentrik, dan (Ω) mewakili frekuensi.
Perlu diingatkan bahawa hanya daya getaran motor yang mengabaikan pengaruh jisim sasaran. Contohnya, objek yang lebih berat memerlukan daya yang lebih besar untuk menghasilkan tahap pecutan yang sama seperti objek yang lebih kecil dan lebih ringan. Jadi jika dua objek menggunakan motor yang sama, objek yang lebih berat akan bergetar kepada amplitud yang jauh lebih kecil, walaupun motor menghasilkan daya yang sama.
Satu lagi aspek motor ialah frekuensi getaran:
$$ f = \frac{Motor \: Kelajuan \:(RPM)}{60}$$
Anjakan yang disebabkan oleh getaran dipengaruhi secara langsung oleh frekuensi getaran. Dalam peranti bergetar, daya bertindak secara kitaran pada sistem. Bagi setiap daya yang dikenakan, terdapat daya yang sama dan bertentangan yang akhirnya membatalkannya. Apabila frekuensi getaran lebih tinggi, masa antara berlakunya daya yang bertentangan berkurangan.
Oleh itu, sistem mempunyai masa yang lebih singkat untuk disesarkan sebelum daya lawan membatalkannya. Selain itu, objek yang lebih berat akan mempunyai sesaran yang lebih kecil daripada objek yang lebih ringan apabila dikenakan daya yang sama. Ini serupa dengan kesan yang dinyatakan sebelum ini mengenai daya. Objek yang lebih berat memerlukan lebih banyak daya untuk mencapai sesaran yang sama seperti objek yang lebih ringan.
Hubungi Kami
Pasukan kami boleh memberikan sokongan dan bantuan denganmotor getaran elektrikproduk. Kami faham bahawa memahami, menentukan, mengesahkan dan mengintegrasikan produk motor ke dalam aplikasi akhir boleh menjadi rumit. Kami mempunyai pengetahuan dan kepakaran untuk membantu mengurangkan risiko yang berkaitan dengan reka bentuk, pembuatan dan pembekalan motor. Hubungi pasukan kami hari ini untuk membincangkan keperluan berkaitan motor anda dan mencari penyelesaian yang sesuai dengan keperluan khusus anda. Kami sedia membantu.
Rujuk Pakar Pemimpin Anda
Kami membantu anda mengelakkan kesulitan untuk memberikan kualiti dan nilai yang diperlukan oleh motor tanpa berus mikro anda, tepat pada masanya dan mengikut bajet.
Mengesyorkan Bacaan
Masa siaran: 17 Nov-2023



