

G は振動の振幅を表すためによく使われる単位です。振動モーターそして、線形共振アクチュエータ。これは重力による加速度を表し、約9.8メートル毎秒毎秒(m/s²)です。
1Gの振動レベルとは、振動振幅が物体が重力によって受ける加速度に相当することを意味します。この比較によって、振動の強度と、それが現在のシステムやアプリケーションに及ぼす潜在的な影響を理解することができます。
Gは振動の振幅を表す一つの方法に過ぎず、特定の要件や規格によっては、メートル毎秒二乗(m/s²)やミリメートル毎秒二乗(mm/s²)などの他の単位で測定することも可能です。とはいえ、Gを単位として使用することで明確な基準点が得られ、顧客が振動レベルを適切に理解するのに役立ちます。
振動振幅の尺度として、変位(mm)や力(N)を用いない理由は何ですか?
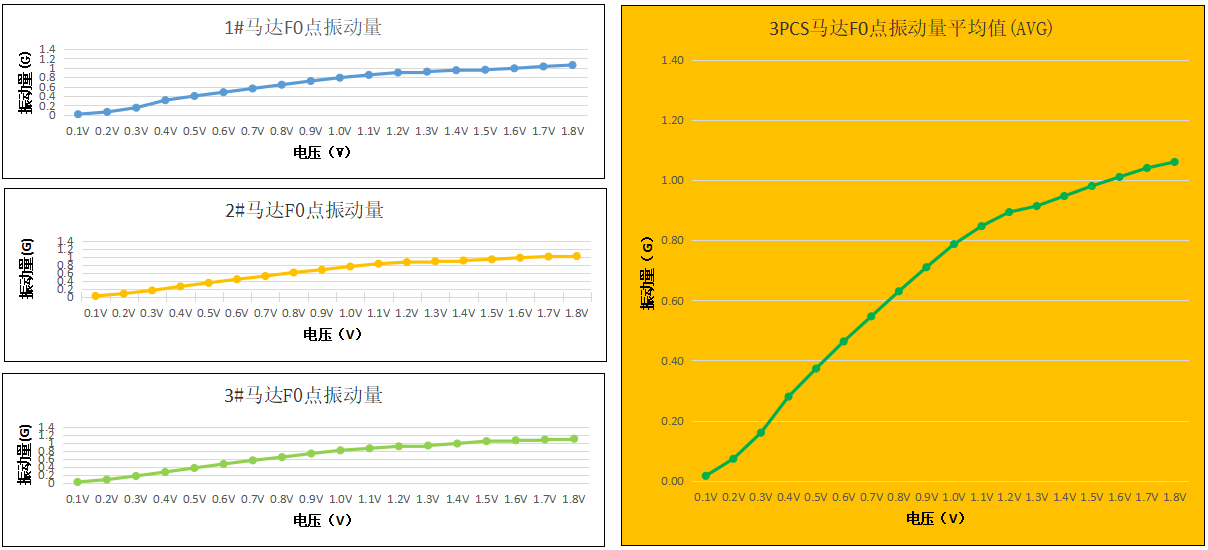
振動モーターこれらは通常単独で使用されることはありません。多くの場合、ターゲット質量とともに、より大きなシステムに組み込まれます。振動振幅を測定するために、モーターを既知のターゲット質量に取り付け、加速度計を使用してデータを収集します。これにより、システム全体の振動特性をより明確に把握することができ、それを典型的な性能特性図に示します。
振動モーターによって発生する力は、次の式によって求められます。
$$F = m \times r \times \omega ^{2}$$
(F)は力、(m)はモーター上の偏心質量の質量(システム全体とは無関係)、(r)は偏心質量の偏心率、(Ω)は周波数を表します。
モーターの振動力のみが、対象物の質量の影響を無視している点に注意が必要です。例えば、より重い物体は、より小さく軽い物体と同じレベルの加速度を生み出すために、より大きな力を必要とします。したがって、2つの物体が同じモーターを使用する場合、モーターが同じ力を発生させても、より重い物体の振動振幅ははるかに小さくなります。
モーターのもう一つの側面は、振動周波数です。
$$ f = \frac{モーター回転数 \:(RPM)}{60}$$
振動によって生じる変位は、振動の周波数に直接影響されます。振動する装置では、力が周期的に作用します。作用する力には必ず等しく反対向きの力が働き、最終的に相殺されます。振動の周波数が高いほど、相反する力が発生する間隔は短くなります。
したがって、反対の力が作用して変位が相殺されるまでの時間が短くなります。また、同じ力が加わった場合、重い物体は軽い物体よりも変位が小さくなります。これは、先に述べた力に関する効果と同様です。重い物体は、軽い物体と同じ変位を得るために、より大きな力を必要とします。
お問い合わせ
私たちのチームは、以下のサポートと支援を提供できます。電動振動モーター製品について。モーター製品の理解、仕様策定、検証、そして最終用途への統合は複雑な作業であることを私たちは理解しています。モーターの設計、製造、供給に伴うリスクを軽減するための知識と専門知識を私たちは有しています。モーターに関するニーズについてご相談いただき、お客様固有の要件に合ったソリューションを見つけるために、ぜひ当社チームまでお問い合わせください。喜んでお手伝いさせていただきます。
リーダーの専門家に相談してください
当社は、お客様がマイクロブラシレスモーターに必要な品質と価値を、納期と予算内で実現できるよう、落とし穴を回避できるようお手伝いいたします。
投稿日時:2023年11月17日



