

G là một đơn vị thường được sử dụng để mô tả biên độ dao động trongđộng cơ rungvà các bộ truyền động cộng hưởng tuyến tính. Nó biểu thị gia tốc trọng trường, xấp xỉ 9,8 mét trên giây bình phương (m/s²).
Khi nói đến mức độ rung động 1G, điều đó có nghĩa là biên độ rung động tương đương với gia tốc trọng trường mà một vật thể trải nghiệm. Sự so sánh này giúp chúng ta hiểu được cường độ rung động và tác động tiềm tàng của nó đối với hệ thống hoặc ứng dụng hiện tại.
Điều quan trọng cần lưu ý là G chỉ là một cách để biểu thị biên độ dao động, nó cũng có thể được đo bằng các đơn vị khác như mét trên giây bình phương (m/s²) hoặc milimét trên giây bình phương (mm/s²), tùy thuộc vào yêu cầu hoặc tiêu chuẩn cụ thể. Tuy nhiên, việc sử dụng G làm đơn vị cung cấp một điểm tham chiếu rõ ràng và giúp khách hàng hiểu được mức độ rung động một cách phù hợp.
Tại sao không sử dụng độ dịch chuyển (mm) hoặc lực (N) làm thước đo biên độ dao động?
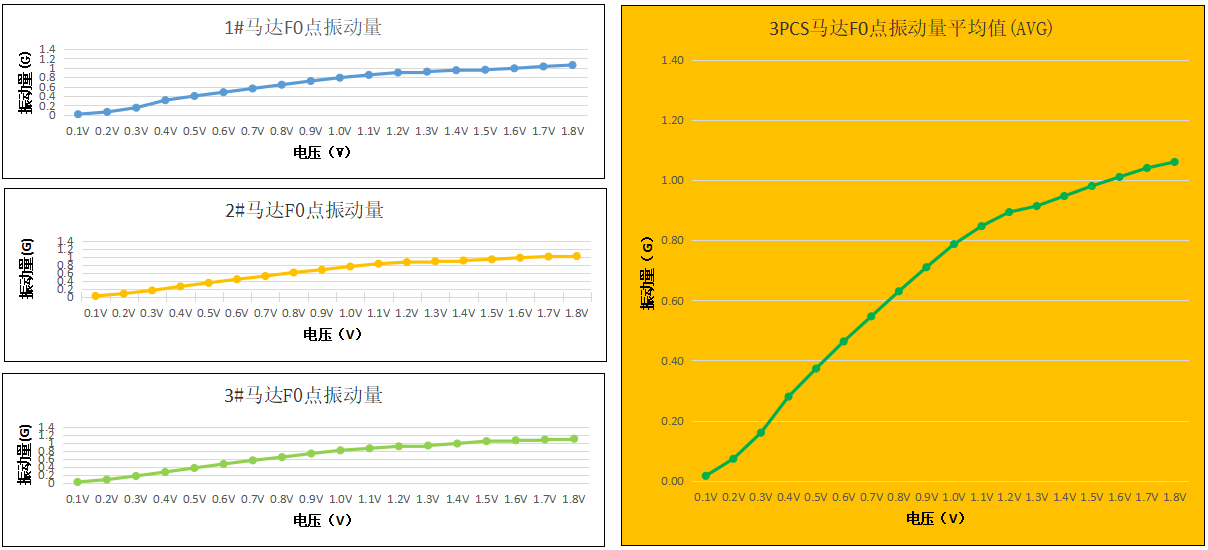
Động cơ rungThông thường, chúng không được sử dụng riêng lẻ. Chúng thường được tích hợp vào các hệ thống lớn hơn cùng với các khối lượng mục tiêu. Để đo biên độ dao động, chúng ta gắn động cơ lên một khối lượng mục tiêu đã biết và sử dụng gia tốc kế để thu thập dữ liệu. Điều này giúp chúng ta có cái nhìn rõ ràng hơn về đặc tính dao động tổng thể của hệ thống, sau đó được minh họa trong biểu đồ đặc tính hiệu suất điển hình.
Lực tác dụng của động cơ rung được xác định bằng phương trình sau:
$$F = m \times r \times \omega ^{2}$$
(F) biểu thị lực, (m) biểu thị khối lượng của khối lượng lệch tâm trên động cơ (bất kể toàn bộ hệ thống), (r) biểu thị độ lệch tâm của khối lượng lệch tâm, và (Ω) biểu thị tần số.
Cần lưu ý rằng chỉ lực rung của động cơ mới bỏ qua ảnh hưởng của khối lượng vật thể cần rung. Ví dụ, một vật nặng hơn cần lực lớn hơn để tạo ra cùng mức gia tốc như một vật nhỏ hơn và nhẹ hơn. Vì vậy, nếu hai vật sử dụng cùng một động cơ, vật nặng hơn sẽ rung với biên độ nhỏ hơn nhiều, mặc dù cả hai động cơ đều tạo ra cùng một lực.
Một khía cạnh khác của động cơ là tần số rung:
$$ f = \frac{Tốc độ động cơ (RPM)}{60}$$
Sự dịch chuyển do rung động gây ra chịu ảnh hưởng trực tiếp bởi tần số rung động. Trong một thiết bị rung, các lực tác dụng lên hệ thống theo chu kỳ. Với mỗi lực tác dụng, luôn có một lực ngược chiều và bằng nhau triệt tiêu lẫn nhau. Khi tần số rung càng cao, thời gian giữa sự xuất hiện của các lực đối nghịch càng ngắn.
Do đó, hệ thống có ít thời gian hơn để dịch chuyển trước khi các lực đối nghịch triệt tiêu lẫn nhau. Thêm vào đó, một vật nặng hơn sẽ có độ dịch chuyển nhỏ hơn một vật nhẹ hơn khi chịu tác dụng của cùng một lực. Điều này tương tự như hiệu ứng đã đề cập trước đó liên quan đến lực. Một vật nặng hơn cần nhiều lực hơn để đạt được cùng độ dịch chuyển như một vật nhẹ hơn.
Liên hệ với chúng tôi
Đội ngũ của chúng tôi có thể cung cấp hỗ trợ và trợ giúp vềđộng cơ rung điệnChúng tôi hiểu rằng việc hiểu, xác định, kiểm định và tích hợp các sản phẩm động cơ vào các ứng dụng cuối cùng có thể rất phức tạp. Chúng tôi có kiến thức và chuyên môn để giúp giảm thiểu rủi ro liên quan đến thiết kế, sản xuất và cung cấp động cơ. Hãy liên hệ với nhóm của chúng tôi ngay hôm nay để thảo luận về nhu cầu liên quan đến động cơ của bạn và tìm ra giải pháp phù hợp với yêu cầu cụ thể của bạn. Chúng tôi luôn sẵn sàng hỗ trợ bạn.
Hãy tham khảo ý kiến chuyên gia lãnh đạo của bạn.
Chúng tôi giúp bạn tránh những cạm bẫy để cung cấp động cơ không chổi than siêu nhỏ chất lượng và giá trị cần thiết, đúng thời hạn và trong phạm vi ngân sách.
Thời gian đăng bài: 17/11/2023



