

Nuolatinės srovės bešepetis variklisKonstrukcijos dizainas yra labai pagrįstas, iš jos naudojimo aiškiai galime pajusti jos naudojimą, pagrįstos konstrukcijos privalumus lengva naudoti, greitas veikimas, matome, kokia didelė ekonominė nauda ir naudojimo nauda pagrįstai konstrukcijai. Taigi, kokia yra jos struktūra?
Pirmiausia, atkreipkite dėmesį į jo struktūrą:
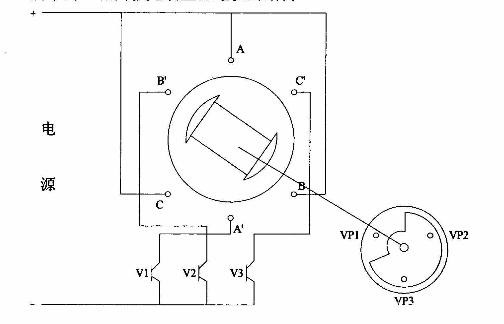
1. A, B ir C yra trifazės statoriaus apvijos, kurios elektroninėje jungiklio grandinėje atitinkamai sujungtos su maitinimo jungikliais V1, V2 ir V3. Padėties jutiklio sekimo rotorius yra ant variklio rotoriaus. VP1, VP2 ir VP3 yra tolygiai paskirstyti viename bešepečio nuolatinės srovės variklio gale 120 laipsnių kampu. Priklausomai nuo tam tikro fotoelektrinio įtaiso, jie apšvitinami šviesa arba ne dėl besisukančio sklendės, esančios ant variklio besisukančio veleno, veikimo.
2. Statoriaus apvijos elektros srovė ir pagrindinis magnetinis laukas, susidarantis dėl elektromagnetinio sukimo momento ir rotoriaus sukimosi sąveikos, sukuriami nuolatinių magnetų ant rotoriaus. Rotoriaus magneto padėtis paverčiama padėties jutikliu ir elektriniais signalais, o tada valdoma elektroninio jungiklio grandinė, kad kiekviena statoriaus fazės apvija savo ruožtu laiduotų statoriaus fazinę srovę kartu su rotoriaus padėties pokyčiu tam tikra komutacijos tvarka. Elektroninio jungiklio grandinės laidumo seką galima sinchronizuoti su rotoriaus sukimosi kampu, kad būtų pasiektas mechaninis atbulinės eigos efektas.
Kadangi bešepetis nuolatinės srovės variklis yra pagrįstai sukonfigūruotas, jį labai gerai naudoti variklio veikimo procese, be jo struktūros supratimo, taip pat turime padaryti jo atbulinės eigos efektą idealesnį, ir jie iš esmės yra sukurti remiantis pagrįsta struktūra.

Įrašo laikas: 2020 m. kovo 28 d.



