

Անխոզանակ մշտական հոսանքի շարժիչԿառուցվածքի դիզայնը շատ խելամիտ է, դրա օգտագործումից մենք կարող ենք հստակ զգալ դրա օգտագործումը, խելամիտ կառուցվածքի առավելությունները՝ հեշտ օգտագործման, արագ շահագործման, մենք կարող ենք տեսնել, թե որքան բարձր են տնտեսական օգուտները և որքան մեծ են խելամիտ կառուցվածքի օգտագործման առավելությունները: Այսպիսով, ինչպիսի՞ն է դրա կառուցվածքը:
Նախ, ուշադրություն դարձրեք դրա կառուցվածքին.
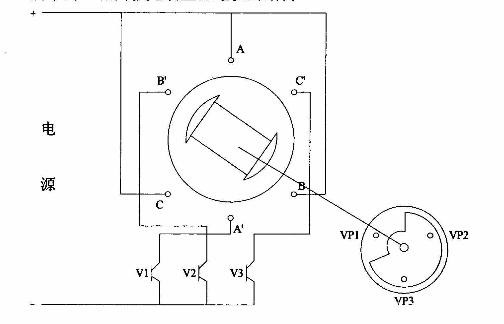
1. A, B և C եռաֆազ ստատորի փաթույթներ են, որոնք համապատասխանաբար միացված են էլեկտրոնային անջատիչի շղթայի V1, V2 և V3 հզորության անջատիչ սարքերին: Դիրքի սենսորի հետևող ռոտորը տեղադրված է շարժիչի ռոտորի վրա: VP1, VP2 և VP3 լարումները հավասարաչափ բաշխված են անխոզանակ հաստատուն հոսանքի շարժիչի մի ծայրում՝ 120 աստիճանի տարբերությամբ: Որոշակի ֆոտոէլեկտրական սարքի համաձայն՝ դրանք ճառագայթվում են լույսով կամ չեն ճառագայթվում լույսով՝ շարժիչի պտտվող լիսեռի վրա պտտվող փակաղակի ֆունկցիայի միջոցով:
2. Ստատորի փաթույթը ունի ընդհանուր էլեկտրական հոսանք, որը առաջանում է մշտական մագնիսների կողմից ռոտորի վրա առաջացող էլեկտրական հոսանքի և հիմնական մագնիսական դաշտի արդյունքում, որը առաջանում է էլեկտրամագնիսական պտտող մոմենտի և ռոտորի պտույտի փոխազդեցության արդյունքում, ռոտորի մագնիսական պողպատի դիրքը դիրքի սենսորով փոխակերպվում է էլեկտրական ազդանշանների, ապա կառավարվում է էլեկտրոնային անջատիչի սխեման, որպեսզի ստատորի յուրաքանչյուր փուլային փաթույթը, իր հերթին, հաղորդունակություն հաղորդի ստատորի փուլային հոսանքին, ինչպես նաև ռոտորի դիրքի փոփոխությանը որոշակի կարգով։ Էլեկտրոնային անջատիչի սխեմայի հաղորդունակության հաջորդականությունը կարող է համաժամեցվել ռոտորի պտույտի անկյան հետ՝ մեխանիկական հակադարձ ազդեցություն ստանալու համար։
Քանի որ անխոզանակ հաստատուն հոսանքի շարժիչի կառուցվածքը խելամիտ է կարգավորված, ուստի այն շատ լավ է օգտագործել, շարժիչի շահագործման ընթացքում, բացի դրա կառուցվածքը հասկանալուց, մենք պետք է նաև դրա հակադարձ ազդեցությունն ավելի իդեալական դարձնենք, և դրանք հիմնականում կառուցված են խելամիտ կառուցվածքի հիման վրա։

Հրապարակման ժամանակը. Մարտի 28-2020



