

מנוע ללא מברשות DCעיצוב המבנה סביר מאוד, מהשימוש בו ניתן להרגיש בבירור את השימוש בו, היתרונות של מבנה סביר הם קל לשימוש, תפעול מהיר, אנו יכולים לראות עד כמה היתרונות הכלכליים גבוהים ושימוש יתרונות מבנה סביר. אז מהו המבנה שלו?
ראשית, נבחן את המבנה שלו:
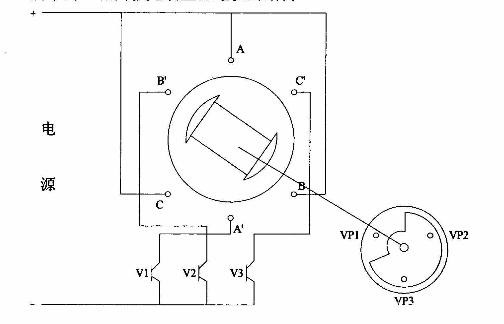
1. A, B ו-C הם סלילי סטטור תלת-פאזיים, המחוברים בהתאמה להתקני מתג ההפעלה V1, V2 ו-V3 במעגל המתג האלקטרוני. רוטור המעקב של חיישן המיקום ממוקם על רוטור המנוע. VP1, VP2 ו-VP3 מפוזרים באופן שווה בקצה אחד של מנוע DC ללא מברשות עם הפרש של 120 מעלות. בהתאם להתקן פוטואלקטרי מסוים, הם מוקרנים על ידי אור או לא באמצעות תפקוד התריס המסתובב על ציר המנוע המסתובב.
2. סליל הסטטור חשמלי משותף, זרם חשמלי ושדה מגנטי עיקרי הנוצרים על ידי מגנטים קבועים על הרוטור כתוצאה מהאינטראקציה בין מומנט אלקטרומגנטי לסיבוב הרוטור. מיקום מגנט הרוטור עם חיישן המיקום יוצרים אותות חשמליים, ולאחר מכן שולטים במעגל המתג האלקטרוני, כך שכל סליל פאזה של הסטטור יעביר, בתורו, את זרם הפאזה של הסטטור יחד עם שינוי מיקום הרוטור בסדר מסוים. ניתן לסנכרן את רצף ההולכה של מעגל המתג האלקטרוני עם זווית הסיבוב של הרוטור כדי להשיג אפקט היפוך מכני.
מכיוון שמבנה מנוע DC ללא מברשות בנוי בצורה סבירה, הוא טוב מאוד לשימוש, בתהליך פעולת המנוע, בנוסף להבנת המבנה שלו, עלינו גם להפוך את אפקט ההיפוך שלו לאידיאלי יותר, ואלה בנויים בעיקרון על בסיס מבנה סביר.

זמן פרסום: 28 במרץ 2020



