

Alalisvoolu harjadeta mootorKonstruktsiooni disain on väga mõistlik, selle kasutamisest alates on selgelt tunda selle kasutamist, mõistliku struktuuri eelised on lihtsad ja kiired ning näeme, kui suur on majanduslik kasu ja kasu mõistlikust struktuurist. Milline on selle struktuur?
Esiteks vaadake selle struktuuri:
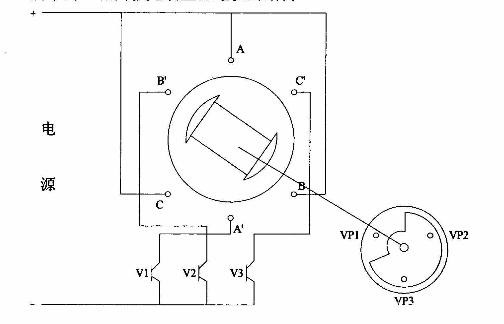
1. A, B ja C on kolmefaasilised staatorimähised, mis on elektroonilises lülitusahelas vastavalt ühendatud toitelülititega V1, V2 ja V3. Asendianduri jälgimisrootor on paigutatud mootori rootorile. VP1, VP2 ja VP3 on harjadeta alalisvoolumootori ühes otsas ühtlaselt jaotatud 120-kraadise nurgavahega. Teatud fotoelektrilise seadme kohaselt kiirgavad nad valgust või mitte mootori pöörleval võllil oleva katiku funktsiooni kaudu.
2. Staatori mähise elektriline ühendus, elektrivool ja püsimagnetite tekitatud peamine magnetväli rootoril, mis tulenevad elektromagnetilise pöördemomendi ja rootori pöörlemise vastastikmõjust. Rootori magneti asend koos asendianduriga muutub elektriliseks signaaliks ja seejärel juhitakse elektroonilist lülitiahelat, nii et staatori iga faasimähis juhib omakorda staatori faasivoolu koos rootori asendi muutumisega teatud kommutatsiooni järjekorras. Elektroonilise lülitiahela juhtivusjärjestust saab sünkroniseerida rootori pöörlemisnurgaga, et saavutada mehaaniline tagasikäigu efekt.
Kuna harjadeta alalisvoolumootori struktuur on mõistlikult seadistatud, on seda mootori töötamise ajal väga hea kasutada, lisaks selle struktuuri mõistmisele peame muutma ka selle tagurpidi efekti ideaalsemaks ning need on põhimõtteliselt üles ehitatud mõistliku struktuuri alusel.

Postituse aeg: 28. märts 2020



