

Бесщеточный двигатель постоянного токаКонструкция очень рациональна, и мы можем ясно увидеть ее преимущества на практике: простота использования, скорость эксплуатации. Мы видим, насколько высока экономическая и практическая выгода от использования рациональной конструкции. Так что же представляет собой ее конструкция?
Для начала взгляните на его структуру:
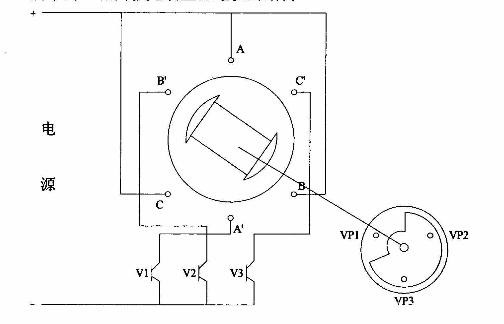
1. A, B и C — трехфазные обмотки статора, которые соответственно соединены с силовыми коммутационными устройствами V1, V2 и V3 в электронной схеме управления. Следящий ротор датчика положения расположен на роторе двигателя. VP1, VP2 и VP3 равномерно распределены на одном конце бесщеточного двигателя постоянного тока с разницей в 120 градусов. В соответствии с определенным фотоэлектрическим устройством, они освещаются или не освещаются светом посредством вращающейся заслонки на вращающемся валу двигателя.
2. В обмотке статора А общий электрический ток и основное магнитное поле, создаваемое постоянными магнитами на роторе в результате взаимодействия электромагнитного момента и вращения ротора, преобразуются в электрические сигналы, которые затем управляются электронной схемой переключения. Таким образом, каждая фаза обмотки статора будет поочередно проводить ток, а фазный ток статора будет переключаться в определенном порядке в зависимости от изменения положения ротора А. Последовательность проведения тока электронной схемы переключения может быть синхронизирована с углом поворота ротора для достижения эффекта механического реверсирования.
Поскольку конструкция бесщеточного двигателя постоянного тока достаточно рациональна, и его использование весьма удобно, в процессе работы двигателя, помимо понимания его структуры, необходимо также оптимизировать эффект реверсирования, что, в основном, и достигается за счет рациональной конструкции.

Дата публикации: 28 марта 2020 г.



