

DC-harjaton moottoriRakennesuunnittelu on erittäin järkevää, sen käytöstä voimme selvästi tuntea sen käytön, kohtuullisen rakenteen edut ovat helppokäyttöisiä, nopeat ja voimme nähdä, kuinka suuret taloudelliset hyödyt ja käyttöhyödyt kohtuullisella rakenteella on. Joten mikä on sen rakenne?
Ensinnäkin, katsotaanpa sen rakennetta:
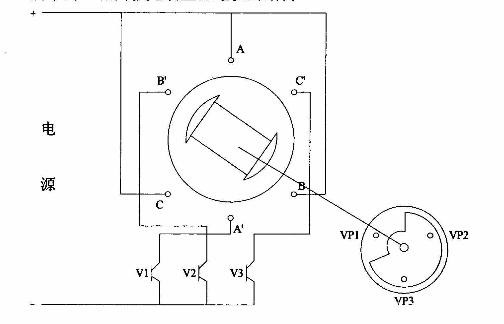
1. A, B ja C ovat kolmivaiheisia staattorikäämejä, jotka on kytketty elektronisen kytkinpiirin tehokytkimiin V1, V2 ja V3. Asentoanturin seurantaroottori on sijoitettu moottorin roottoriin. VP1, VP2 ja VP3 on jaettu tasaisesti harjattoman tasavirtamoottorin toiseen päähän 120 asteen erolla. Tietyn valosähköisen laitteen mukaan ne säteilevät valolla tai eivät moottorin pyörivän akselin pyörivän sulkimen toiminnan kautta.
2. Staattorin käämityksen sähkövirta ja roottorin pyörimissuuntaan liittyvät pysyvät magneetit tuottavat roottorin päämagneettikentän, joka syntyy sähkömagneettisen vääntömomentin ja roottorin pyörimisen välisestä vuorovaikutuksesta. Roottorin magneetin teräksen asento asentoanturin kanssa muuttuu sähköisiksi signaaleiksi ja elektroninen kytkinpiiri ohjaa siten, että staattorin jokainen vaihekäämitys puolestaan johtaa staattorin vaihevirtaa roottorin asennon muutoksen mukana tietyssä järjestyksessä. Elektronisen kytkinpiirin johtavuusjärjestys voidaan synkronoida roottorin pyörimiskulman kanssa mekaanisen peruutusvaikutuksen saavuttamiseksi.
Koska harjaton tasavirtamoottori on rakennettu kohtuullisesti, on erittäin hyvä käyttää sitä moottorin toiminnan aikana. Sen rakenteen ymmärtämisen lisäksi meidän on myös tehtävä sen peruutusvaikutuksesta ihanteellisempi, ja ne on pohjimmiltaan rakennettu kohtuullisen rakenteen perusteella.

Julkaisun aika: 28.3.2020



